






拆码垛场景的关键痛点
- 不规则或混合载荷:传统系统难以应对混合 SKU、错位或随机堆叠的货物,容易导致吞吐量不稳定。
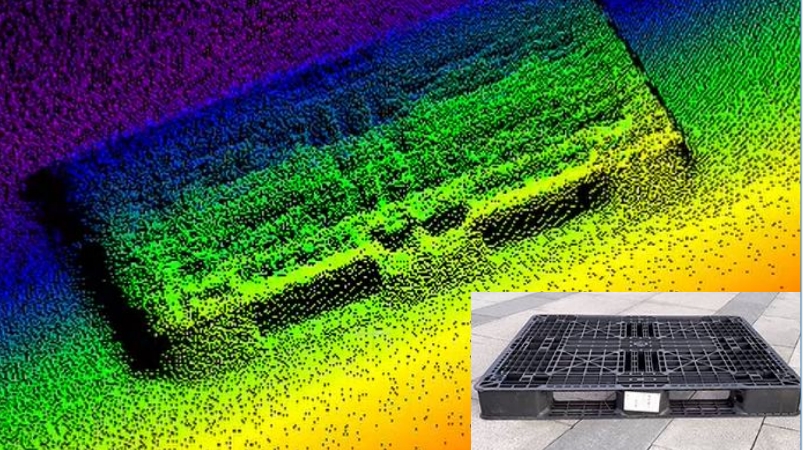
- 复杂包装材料:透明缠绕膜、光亮或强反射表面,以及深色纸箱,会让传统传感器难以准确区分边缘和形状。
- 安全与体力负担:人工搬运重复性强且存在危险,容易造成较高的工伤风险,尤其是肌肉骨骼损伤。
- 空间利用不足:不合理的堆叠方式会造成托盘不稳定,并降低运输与仓储效率。
- 调试与换型耗时:当产品类型频繁变化时,机器人系统往往需要耗费较长时间重新编程和调试。

RGB-ToF 融合感知与嵌入式 AI 的技术优势
面向自动化拆垛场景,歌尔微方案不只是提供一颗 3D 相机,而是将 RGB-ToF 融合感知、深度计算与嵌入式 AI 识别能力集成到相机端,形成可快速部署的智能视觉感知单元。
| 优势维度 | 说明 |
| 系统架构 | 基于 RGB-ToF 融合感知与嵌入式 AI 神经网络,直接输出可用于机器人抓取决策的视觉结果。 |
| 端侧集成 | 深度计算与 AI 识别算法在相机内运行,无需额外外接工控机,降低系统复杂度。 |
| 识别效率 | 在物体检测与分割环节,借助 ToF 直接获取的高质量深度数据与轻量化神经网络加速,单次识别时间可由传统方案的 1–2 秒缩短至 100 毫秒以内。 |
| 节拍提升 | 毫秒级识别响应可显著提升机器人拆垛节拍,减少等待时间,提高产线吞吐效率。 |
| 成本与可靠性 | ToF 模组更具性价比,结构更紧凑,可靠性更高,可实现“即插即用”的智能感知,降低系统集成复杂度与硬件投入成本。 |
为什么 3D ToF 相机是自动拆码垛的关键突破
与传统机械码垛系统和人工码垛相比,3D ToF 机器人视觉系统能够在复杂包装、混合货物、空间受限和快速换型等场景中提供更灵活、更稳定的 3D 感知能力。
| 目标物适应性 | 高:可处理混合 SKU、不规则形状和多尺寸物品。 | 低:更适合统一箱型和固定码垛模式。 | 高:人工可灵活适应各种形状和尺寸。 |
| 吞吐速度 | 快:最高可达每小时 1,000 箱;无需扫码暂停。 | 很快:在单一 SKU 场景中可超过每分钟 150 箱。 | 慢:受体力、疲劳和操作速度限制。 |
| 空间需求 | 紧凑:占地小,通常可直接安装在机器人末端或机头位置。 | 较大:通常需要较长输送线和安全区域。 | 可变:取决于人员数量和通道空间。 |
| 反光材料处理 | 优秀:先进 ToF 算法可过滤塑料缠绕膜产生的“幽灵数据”。 | 不适用:主要依赖机械结构。 | 优秀:人眼可自然处理反射干扰。 |
| 深度感知能力 | 完整 3D:可为每个像素捕获完整空间深度数据。 | 无:依赖固定机械对齐。 | 生物 3D:依赖人类立体视觉。 |
| 劳动安全 | 高:可减少重体力搬运,并实时识别障碍物。 | 中:具备防护,但仍依赖机械安全锁。 | 低:存在重复劳损和搬运伤害风险。 |
| 换型时间 | 即时:软件定义,无需机械换型。 | 慢:常需手动进行机械调整。 | 即时:可通过口头指令调整。 |
| 长期成本 | 较低:可显著节省人工和维护成本。 | 中等:运动部件多,维护频率较高。 | 最高:持续产生工资、福利和工伤相关成本。 |
为什么选择歌尔微
英飞凌芯片加持的高性价比硬件
通过推出搭载英飞凌 ToF 芯片的产品(如 DS62 /63 系列),歌尔微显著降低了 3D 视觉的价格门槛,使几十个码垛工位的大规模部署在经济性上更可行。
强环境光抗干扰能力
无论是在昏暗的仓库灯光下,还是靠近明亮装卸口的区域,ToF 技术都能提供稳定一致的深度数据,减少自然光干扰对识别结果的影响。
工业级防尘防水& 坚固结构
DS87 和 NYX660 等型号可以达到 IP67 防护等级,实现工业级防尘、防水,适用于各种严苛的仓库或流水线作业环境。

全新 GUI 拆码垛机器视觉算法
降低开发门槛
通过图形化拖拽与参数配置,非视觉算法专家也能完成手眼标定、物体识别和抓取点计算。
针对场景深度优化
针对纸箱、软包、袋装物等常见拆码垛对象进行算法优化,在复杂环境下保持识别精度。
兼顾稳定性与成本
高效算法架构可在高性能且具备成本优势的硬件平台上实现商业级识别稳定性与响应速度。
支持平台

Windows 10/11
(x86_64 architecture)

Ubuntu
(x86_64 architecture)

Arm-Linux
(AArch64 architecture)
欢迎合作

硬件生产商

系统集成方

电商企业

物流企业
相关产品

脉冲波 iToF 3D ToF RGBD 相机 NYX650/ 660
连续波 iToF 3D ToF RGBD 相机 DS86/ 87



