在现代制造和物流环境中,工业自动化正在快速发展。在复杂的拆码垛场景下,机器人需要准确地识别、抓取和移动杂乱的箱子或堆叠在托盘中的物体。随着飞行时间 (ToF) 相机的大规模应用,拆码垛场景正在变得更智能高效。让我们一起来探索Vzense的ToF相机是如何赋能工业场景的拆码垛场景吧!

Table of Contents
ToF 相机如何在工业自动化中发挥作用?
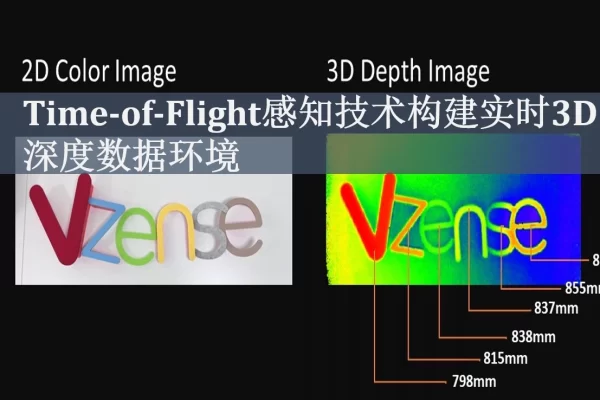
ToF 相机的工作原理是测量相机发出的红外光从物体上反射并返回所需的时间。这使它们能够捕获高精度的深度数据。与传统的 2D 视觉系统相比,ToF 技术能够提供完整的三维空间信息,显著提高了工业机器人在卸垛和物体拾取任务中的性能和可靠性。
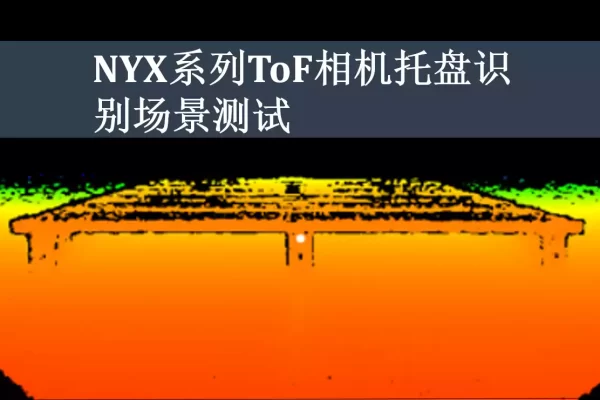
在形状不规则或随机堆叠物品的场景中,间接飞行时间 (iToF) 相机具有出色的环境适应性和卓越的深度传感能力。如下图所示的点云,Vzense 的 DS 系列 ToF 相机在精确边缘检测方面表现出色。

超码垛中面临的主要挑战
在引入 3D 相机系统之前,各行各业面临几个主要的挑战:
❌依赖体力劳动:任务重复、效率低下且存在安全风险。
❌ 2D 视觉系统的局限性:由于缺乏深度数据,这些系统通常会导致物体抓取过程中的高故障率。
❌僵化的自动化设置:当物体形状或排列发生变化时,系统缺乏适应性。
这些问题阻碍了工业自动化在实际生产环境中的可扩展性和灵活性。
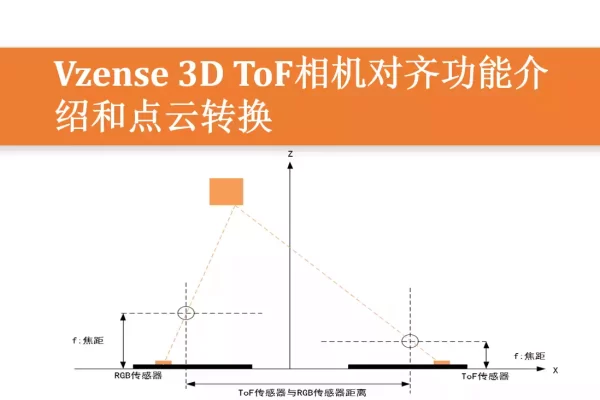
Vzense 3D ToF 相机如何实现灵活的自动化?
为了解决这些痛点,Vzense 的 RGB-D ToF 相机将高精度深度数据与高分辨率 RGB 成像相结合。当与智能算法和机器人控制系统集成时,它们可提供以下功能:
✅高精度 3D 物体识别:精准识别物体形状、大小和位置,并快速定位。
✅ 实时路径规划和避障:机器人可以智能地避免碰撞并优化其抓取路径。
✅ 对混合或无序堆叠的适应性:可以准确识别各种形状、大小和材料的物体。
✅ 提高生产线的稳定性: 适用于工作负载不断变化的动态工业环境。
实际应用:由 3D 相机提供支持的智能拆码垛
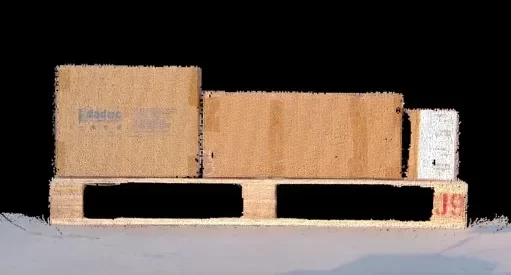
在某客户的项目中,Vzense ToF 相机被集成到自动卸垛工作站中。面对大小不一、堆垛不平整和反光表面的纸箱,该系统使用深度图来确定精确的物体位置,并引导机械臂进行准确抓取。下图说明了相机对木托盘的实时可靠检测。
通过使用 vzense 的解决方案,人工干预减少了约 80%,实现了全天候无人值守作。这转化为更低的劳动力成本、更高的运营效率和更好的灵活生产线的适应性。
为什么与 Vzense 合作提供 3D 视觉解决方案?
Vzense 致力于为工业客户提供可定制的 RGB-D ToF 相机解决方案。无论您是处理高速物体拾取、复杂的卸垛还是智能分拣任务,Vzense 都能提供可靠、精确和经济的 3D 视觉支持。
利用 Time-of-Flight 技术塑造智能工厂的未来
从自动拆码垛的应用来看,基于飞行时间的 3D 视觉系统正在成为下一代工业自动化的核心推动因素。借助 Vzense 的高性能 RGB-D ToF 相机,工厂可以提高生产力,增强系统灵活性和稳定性,并为真正的智能制造铺平道路。
想要探索更多 3D 相机应用?查看我们的案例研究博客。