Table of Contents
视场介绍
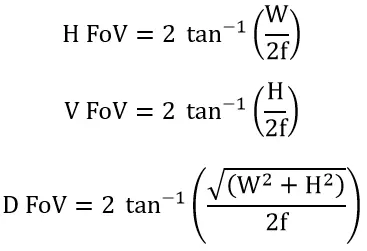
视场(Field of View, FoV)是指相机传感器上可以捕捉到场景或物体的最大区域。它由镜头的焦距和传感器的大小决定。较长的镜头或较小的传感器会产生较窄的视场,而较短的镜头或较大的传感器会产生较宽的视场。根据视场的方向,视场角可以分为以下三类:H FoV-水平视场;V FoV-垂直视场;D FoV-对角视场。如下图所示:

假设传感器图像区域的宽度为W,高度为H,焦距f,则每个视场角的计算方法如下:
角分辨率介绍
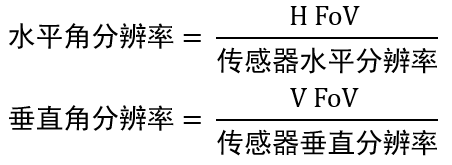
角分辨率是指两个相邻像素之间的最小角度。角分辨率通常以每度像素数(Pixels Per Degree, PPD)表示。PPD表示视场每度内的像素数量。PPD值越高,显示的细节越精细,视觉清晰度越高。在相同视场内,像素越多,角分辨率越高。使用相同的光学系统在相同距离下,更多的像素可以提供更大的视场。
分别计算水平和垂直角分辨率,公式如下:
ToF相机如何通过FoV计算覆盖视野?
在已知垂直视场角VFoV 角度为 α 且 ToF(Time-of-Flight)相机到目标的距离 d,可以计算出垂直方向的覆盖区域如下:

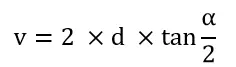
同样地,假设水平视场角(H FoV)为β,则水平方向的覆盖区域为:

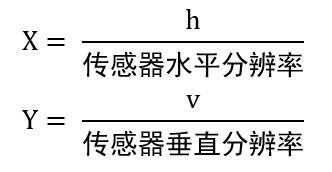
ToF相机的X,Y分辨率如何计算?
ToF 相机的 X 和 Y 分辨率的计算公式如下:
举例:
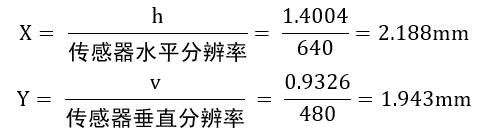
ToF 相机的分辨率为 640×480,ToF 的 FoV 角度分别为水平视角 H FoV = 70°,垂直视角V FoV = 50°,计算当物体放置在1m处时 ToF 相机的X,Y 分辨率:
第一步计算覆盖区域:

第二步计算 ToF 中 X、Y 的分辨大小:
物体放置在其他距离时的相应X,Y分辨率如下表所示:
| 距离 | 水平覆盖范围(m) | 垂直覆盖范围(m) | X(mm) | Y(mm) |
| 2m | 2.8008 | 1.8652 | 4.3763 | 3.8858 |
| 3m | 4.2012 | 2.7978 | 6.5644 | 5.8288 |
| 4m | 5.6016 | 3.7304 | 8.7525 | 7.7717 |
| 5m | 7.002 | 4.663 | 10.9406 | 9.7146 |