在工业4.0和智能制造加速发展的今天,高精度三维感知技术正成为推动产业升级的关键引擎。
作为三维视觉领域的核心技术之一,飞行时间(Time-of-Flight,ToF)测量技术凭借其非接触、高精度、实时性强等优势,正在机器人导航、工业检测、智能物流等领域展现出巨大价值。歌尔微电子作为国内领先的ToF 技术解决方案提供商,基于多年技术积累,构建了完整的ToF 产品生态。
本文将系统介绍ToF 技术原理、产品特性及典型应用,为工程技术人员提供全面的技术参考。
Table of Contents
一、ToF 相机核心组成
ToF(Time-of-Flight)相机主要由四大核心部件构成:
计算单元、发射光源、控制单元、ToF传感器。
注:部分机型集成RGB相机
二、ToF 相机工作原理
上述构成部件中,最重要的部件是发射光源和ToF 传感器。发射光可以是激光、红外或可见光,目前大多数ToF 相机使用近红外光。
3D深度数据是通过测量发射光从场景反射回传感器所需的时间来计算的。3D 深度数据是通过测量发射光从场景反射回传感器所需的时间来计算的。
飞行时间有不同类型,包括直接飞行时间和间接飞行时间。本篇文章我们主要讨论间接飞行时间。
三、间接飞行时间(iToF)的分类
连续波间接飞行时间的基本原理是通过将光调制成一定频率的方波,测量发射和接收周期之间的相位偏移,从而通过计算相位偏移来测量距离。如何计算相位偏移(φ)呢?由于难以直接测量光速,相机将激光发射器调制成四个不同时间偏移的相位能量图,分别为 0°、90°、180°、270°,通过积分能量值计算出相位偏移。
P-iToF 的基本原理是发射重复的脉冲信号并分析脉冲信号的相位以获得深度,如何获取飞行时间t呢?相机需要将激光发射端调制成具有不同时间偏移的两个相位能量图,分别为0°和180°,此外,在没有光脉冲发射时开启,只收集背景光信号。根据相应的比例,可以计算出飞行时间 t。
详情可参见:技术笔记02-间接飞行时间(iToF)技术原理介绍:连续波技术和脉冲波技术
四、歌尔微 Vzense ToF 相机产品矩阵
歌尔微电子基于多年技术积累,推出差异化产品矩阵:
| 对比维度 | DS系列(连续波) | NYX系列(脉冲式) |
|---|---|---|
| 高精度 | √ | |
| 高帧率 | √ | |
| 低功耗 | √ | |
| 低抖动 | √ | |
| 强抗光 | √ |
行业选型建议:
- 精密检测领域:推荐采用DS86型号,其配备Sony IMX570 深度传感器,在光学计量场景中重复测量精度达99%
- 移动机器人、自动化运用:首选NYX650型号。集成Nuvoton 脉冲芯片,支持实时点云处理,30fps高帧率,强抗光。室内户外畅行无阻。
五、适合ToF 相机的应用场景
我们的第一个技巧是关于理解ToF最适合哪些应用。在这张图表中,可以直观地看到工作距离和3D精度。我们的相机适合0.1米到5米的工作距离,精度误差约为5毫米,因此它不适合需要高度细节的3D扫描,如光学计量。它最适合短距离机器人导航和避障,以及自动化物料处理,如托盘堆垛或料箱检测。
六、光照条件
那么如何充分发挥ToF相机的性能呢?首先要看的是照明。
这里展示了我们的光谱响应曲线,特别标出了940nm 这个波长。这个波长很重要,因为太阳光在这个波长有自然衰减。ToF相机还会配置带通滤波器来阻挡其他阳光干扰。
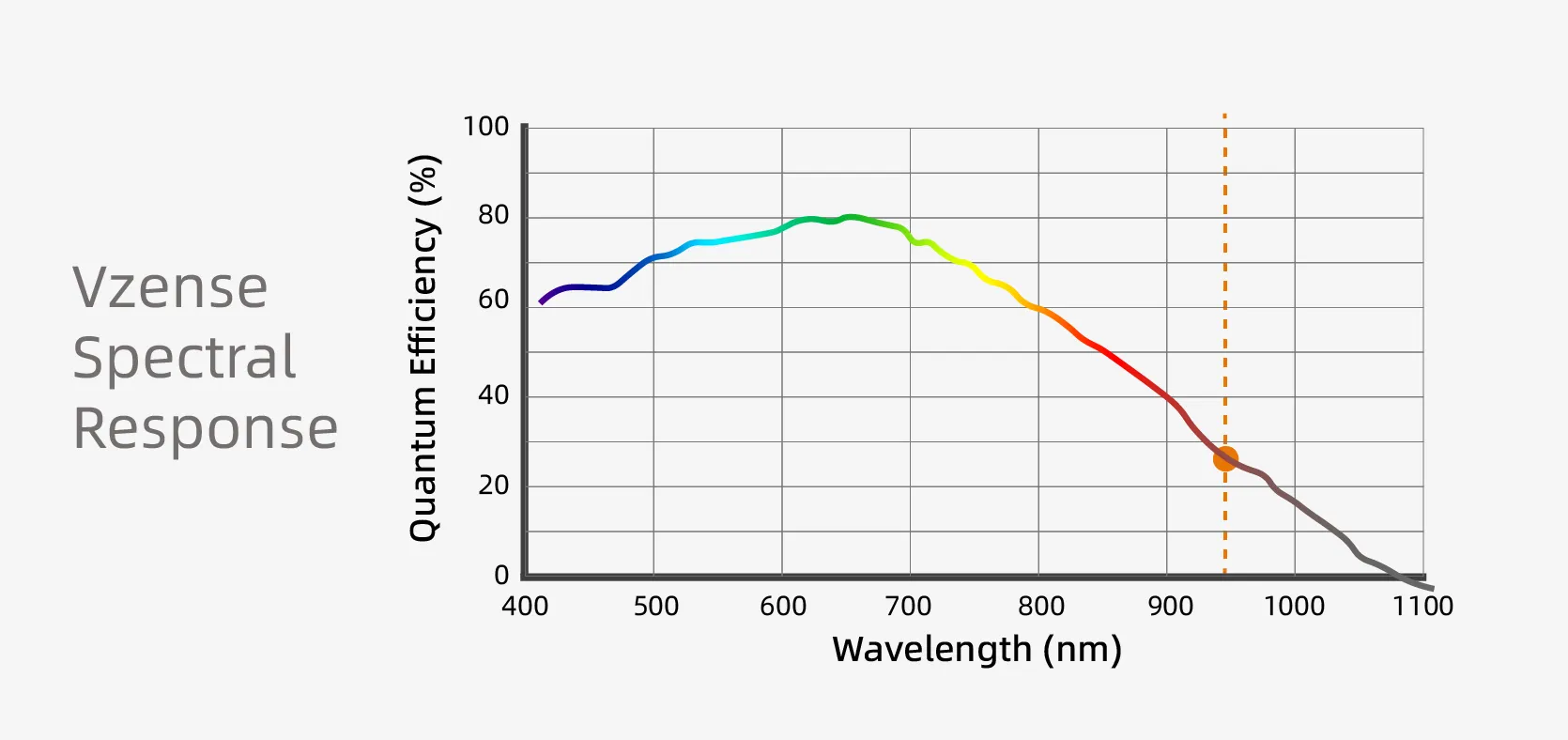
如果没有滤波器,阳光的强度很容易使信号过度饱和。所以如果需要在户外使用ToF相机,选择带有带通滤波器和940纳米发射光的型号很重要。
七、运动拖影
接下来是运动导致的拖影问题。如果我们仔细观察连续波飞行时间的一帧深度数据的构成,会发现它实际上由4个90度相位差的微帧组成。这表明,如果物体或相机移动速度过快,可能会导致3D失真。一般来说,在视场角和距离相同的情况下,检测的运动速度阈值由相机帧率和曝光时间决定。而我们的脉冲波NYX 系列则在原理层面很好地解决了这个问题。
脉冲波的信号占空比高,信噪比低,具备更短的曝光时间,更高的帧率,在快速移动物体的检测上更有优势。
八、高反射率与低反射率表面
现在让我们来看看极端反射率的物体。轮胎是一个同时包含低反和高反部分的典型物体。我们让相机在不同的曝光参数和HDR是否开启的情况下检测并对比点云效果,我们可以观察到,在HDR模式默认关闭的情况下,适当增大曝光时间可以改善低反表面的点云情况。但是当曝光时间过大时,又容易引起高反部分的过曝,歌尔微TOF 相机的HDR 模式就是用来解决这一问题的,同样是1000μs 的曝光时间,打开软件中的HDR模式后,高反部分的过曝情况消失,低反表面和高反表面的点云细节表现都更好。
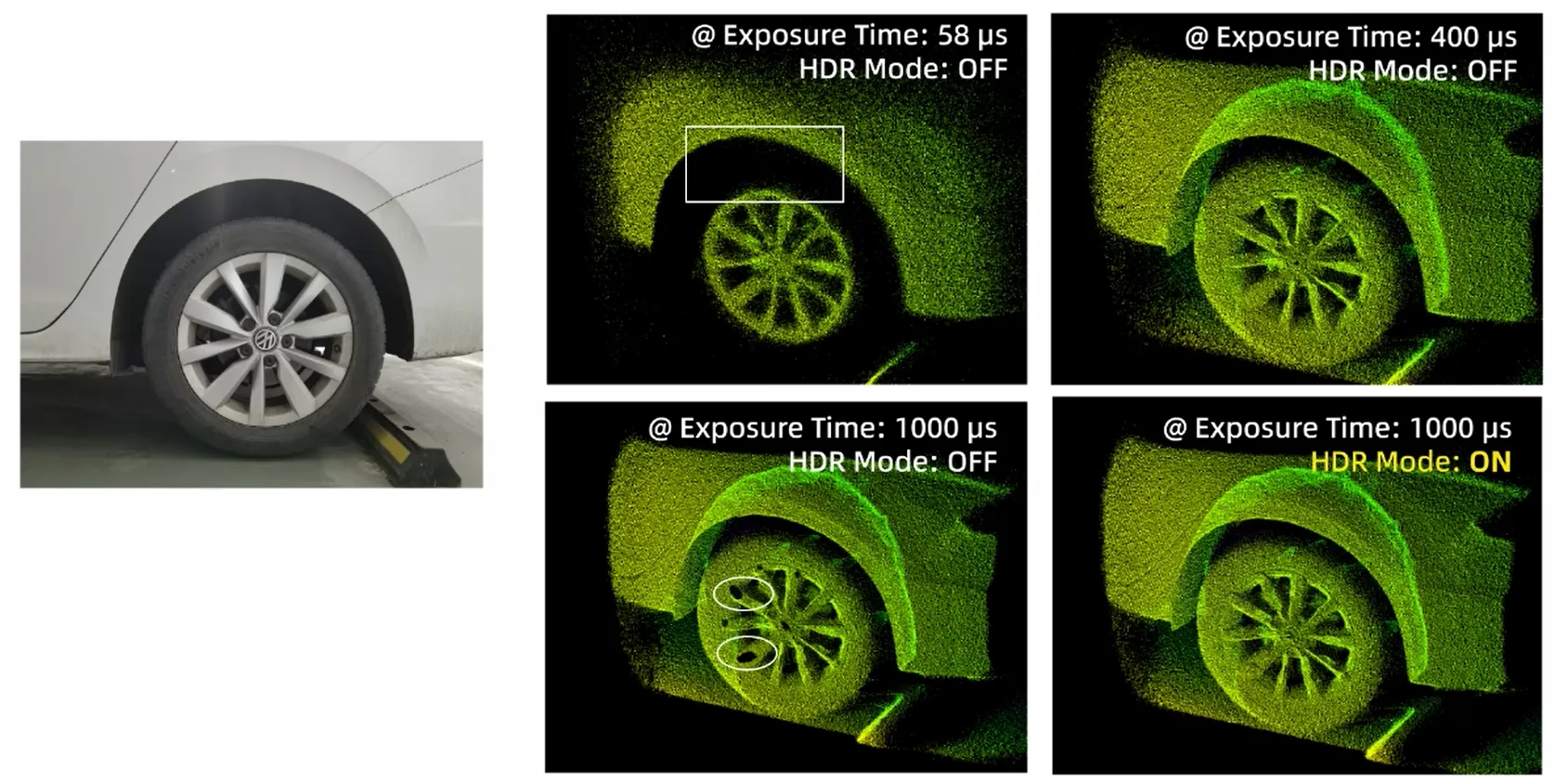
所以解决极端反射率表面时,调整曝光时间和开启HDR模式是有效方法。
九、多径反射
什么是多路径?就是发射光在返回传感器前经过了多个表面的反射,而不是直接反射回来。在这个例子中,我们展示了凹角如何导致细节丢失:
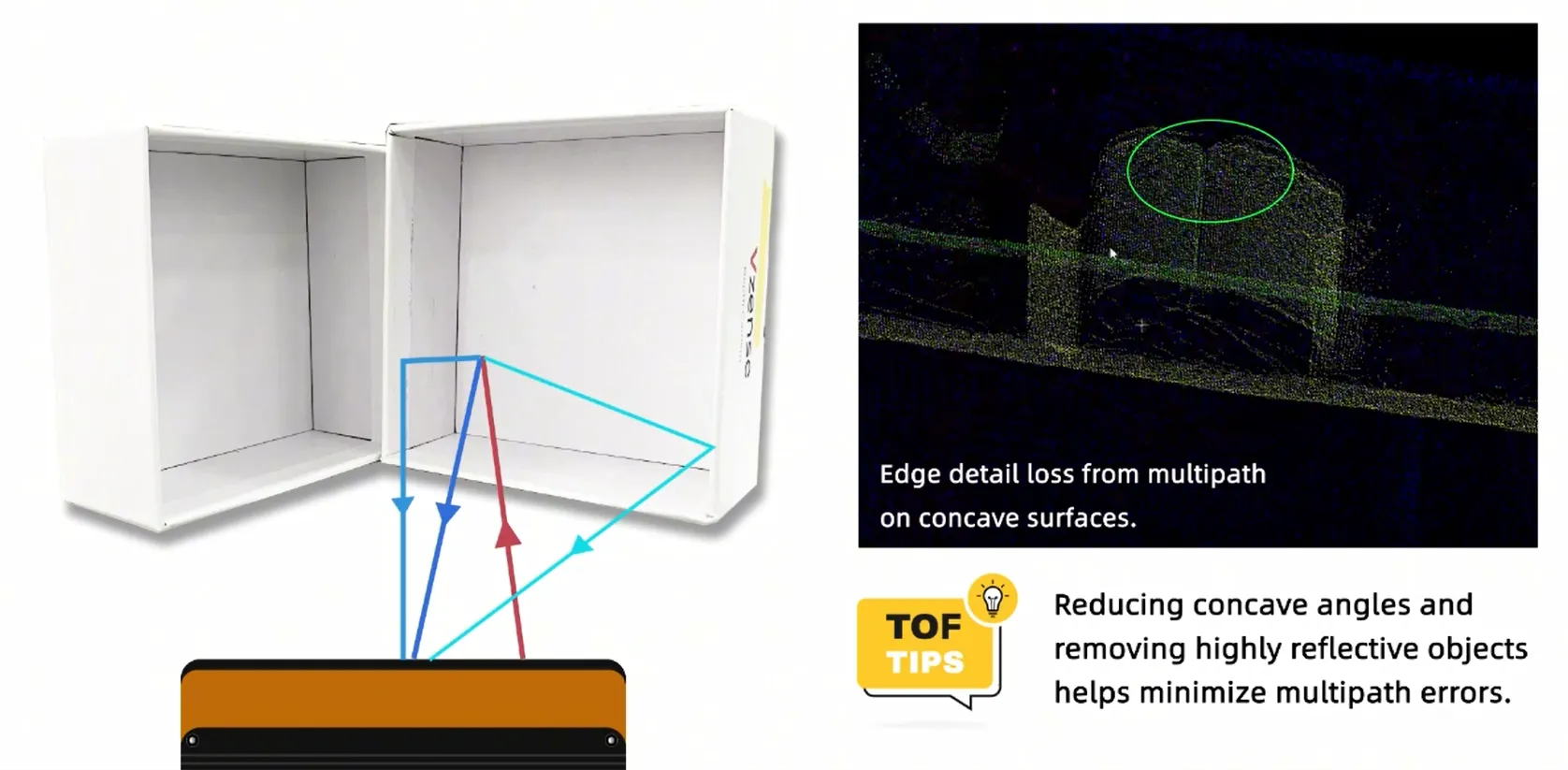
多径是ToF 相机的原理性问题,在某些情况下,最好的办法就是尽量减少这类凹角,并移除场景中非必要的镜面物体。
十、飞点
飞点作为由ToF(Time-of-Flight)相机生成的3D点云中的错误像素出现,通常出现在场景的深度不连续处,特别是在物体边界处,前景和背景的光线可能在边缘处结合,产生中间错误的深度值,消除飞点的方法有改善环境光,移除高反物体或使用飞点滤波。
十一、软件滤波
下面我们就重点探讨歌尔微ToF 相机软件所具备的各种滤波功能,它们是置信度滤波、空间滤波、飞点滤波和时间滤波。
置信度滤波是基于信号强度阈值的高通滤波,通过剔除低置信度(如弱振幅/低信噪比)的深度像素来提升数据可靠性。
空间滤波是采用卷积核对局部邻域进行加权计算的空域处理,有效减少图像中的噪声。
飞点滤波针对深度突变区域的边缘感知中值滤波,通过邻域深度一致性检验消除物体边界处的悬浮伪影。
时间滤波是通过多帧时序融合实现的低通滤波,在保留场景静态结构的同时抑制随机噪声。
今天的探讨就到这里,希望这篇文章对您有所帮助,如果有任何问题或需要了解更多细节,欢迎浏览我们的网站或留言。