Table of Contents
一、 行业洞察:柔性生产下的感知瓶颈
随着工业4.0与智能仓储的普及,生产线正加速向柔性化转型。物料多样化、堆叠随机化及高频作业节拍,对机器人视觉感知提出了严苛挑战。
传统2D视觉方案因缺乏深度信息,在面对复杂光影或乱序重叠场景时,难以平衡感知精度与作业效率。
行业亟需具备精准三维感知、高鲁棒性且能快速落地的新一代视觉引导方案。

二、 核心方案:歌尔微3D ToF全栈式引导方案
针对上述痛点,歌尔微3D ToF团队依托深厚的光学感知积淀,重磅推出自研3D ToF视觉引导自动拆码垛解决方案。
该方案赋予工业机器人精准的“三维视野”,可智能引导其完成对纸箱、软包等物料在托盘、传送带或分拣设备间的精准抓取与放置。
该方案可广泛应用于物流仓储、电商分拣、食品日化等多个垂直领域,成为企业构建敏捷、高效、无人化智慧物流体系的核心技术基石。
三、 硬件焕新:DS系列ToF相机矩阵
优秀的算法离不开卓越的硬件承载。目前,歌尔微DS全系列ToF相机均已完美适配该拆码垛算法。
经典基石: DS 86/87 持续以高稳定性服务于一线场景。
重磅新品: 近期,歌尔微将正式推出搭载英飞凌 IRS2976C ToF 图像传感器的旗舰新品——DS 62/63。
相较于前代产品,DS 62/63 在缩小体积的同时,实现了高性价比、高帧率与大视场角(FOV)的平衡。对于受限于机械臂末端空间(Eye-in-Hand)且需高速识别、连续作业的复杂系统而言,DS 62/63 是当之无愧的感知首选。

四、 精准拆垛算法:从感知到执行的精密闭环
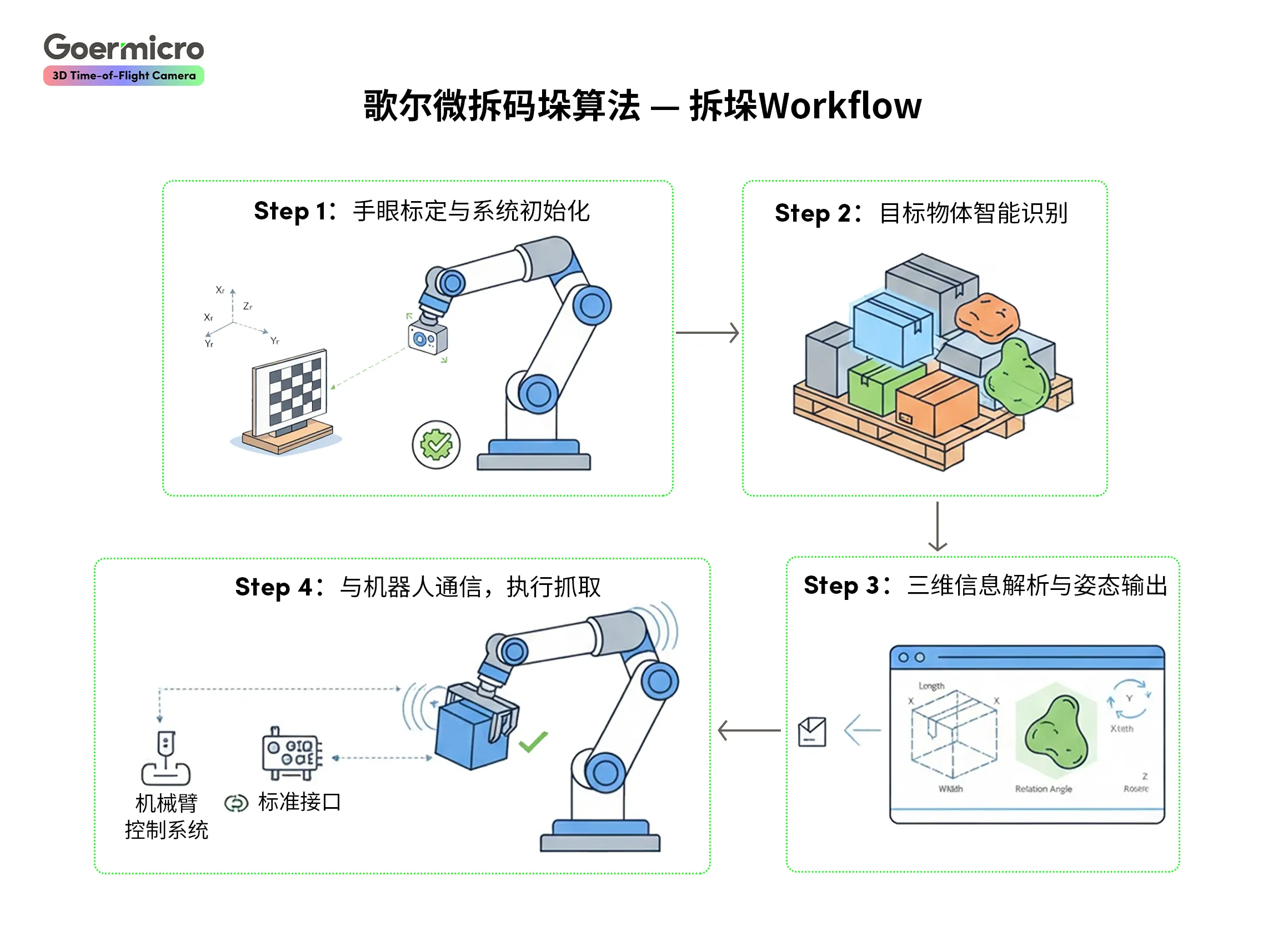
歌尔微自研拆垛算法通过全流程优化,确保每一处细节的极致匹配,实现“感知即执行”的高效作业:
- 高精度手眼标定:通过系统初始化,建立 3D ToF 相机与机械臂之间的精密映射关系,确保感知数据与执行动作实现毫米级位姿耦合。
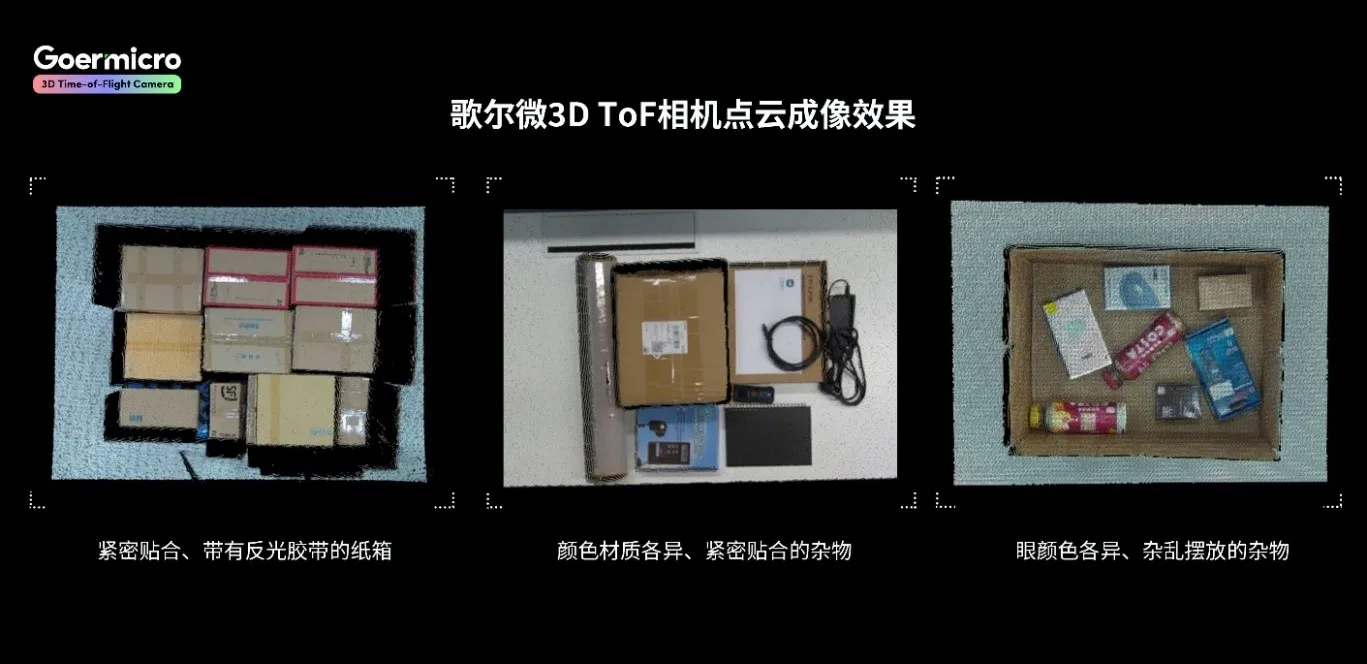
- 目标物体智能识别:依托实时生成的深度点云信息,算法可自主识别并区分规则箱体与软包物料,即便面对随机堆叠或乱序工况,依然保持卓越的识别鲁棒性。
- 多维姿态解析:精准解算目标物体的长宽尺寸、中心三维坐标及 XY 平面旋转角,为机器人抓取决策提供全维度、高精度的数据支撑。
- 动态联动与高效执行:方案深度兼容 TCP 与 Modbus 通信协议,确保目标位姿数据从视觉终端到控制系统的低延迟、高可靠传输,实时引导机器人完成稳定抓取与高效拆垛。
五、 方案亮点:深度赋能工业场景
- 极致感知,无惧环境干扰: 采用先进的ToF技术与HDR高动态范围组合,在强光环境或复杂背景下仍能保持高可靠的深度捕获能力。
- 轻量化设计,灵活集成: 机身紧凑且功耗极低(<5W),完美适配机械臂末端安装,降低运动负载,提升系统灵活性。
- 软硬协同,性能倍增: 自研算法针对DS系列硬件深度优化,显著提升识别速度与成功率,实现真正的“开箱即用”。
- 开放生态,快速落地: 提供跨平台SDK(Windows/Linux/ROS)及多语言支持(C++/Python等),极大缩短了企业二次开发的周期。
- 降本增效,普惠行业: 相比结构光或高阶激光雷达方案,歌尔微ToF方案在成本控制与性能产出比上展现出核心竞争力。
歌尔微电子始终致力于通过感测技术的创新,为自动化装备注入更多“智慧”。
如需了解更多关于 DS 62/63 新品参数或拆码垛算法演示,欢迎联系我们的技术专家。