Table of Contents
背景介绍
我们可以使用多种指标来评估深度质量。推荐使用一个兼容所有测试的通用场景,例如一个光滑平整、哑光均匀、平行对齐深度相机的平面,测试过程中将其与相机放置在一个可控并已知的距离。安装在刚性框架或结构上的白色或浅色板是一个合适的目标。深度数据的绝对精度和相对精度(也称为时间噪声或可重复性)是判断深度相机图像质量的主要特征。请参考《技术笔记01-理解绝对精度与相对精度:二者区别是什么?》了解绝对精度和相对精度。本文介绍了DS系列ToF(Time-of-Flight) 相机深度质量测试。
DS系列产品
DS系列包含DS86,DS87两款产品,采用索尼最新款连续波ToF芯片IMX570研发的CW-iToF相机。DS系列相机数据稳定性高,分辨率高,精度高,支持大广角镜头定制,户外抗光性强,可适用于室外场景。相机采用工业级标准设计,可靠性、稳定性高。相机底部双向安装螺孔设计,便于结构集成固定。可选航空插头的防水设计,支持IP67高防护等级。
测试条件
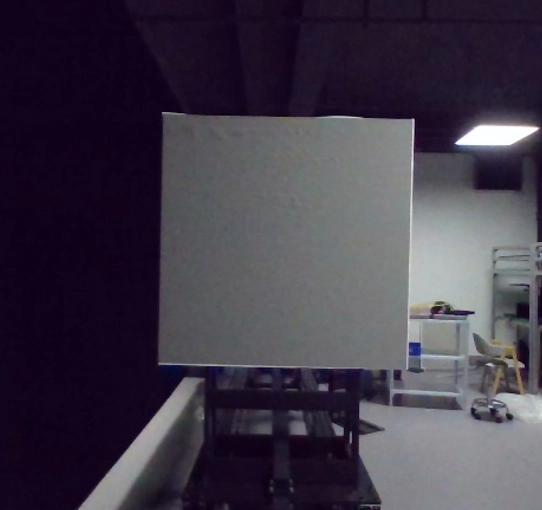
目标物体:80cmx80cm 40%平面反射率的灰色标定板,安装在与运动平台相连的杆上。如下图所示:
测试相机:随机选择3台已完成标定的DS86相机,标定时,采用80cmx80cm 40%平面反射率的灰色标定板。DS87的成像性能与DS86是完全相同,因此DS86的表现可以代表DS87。
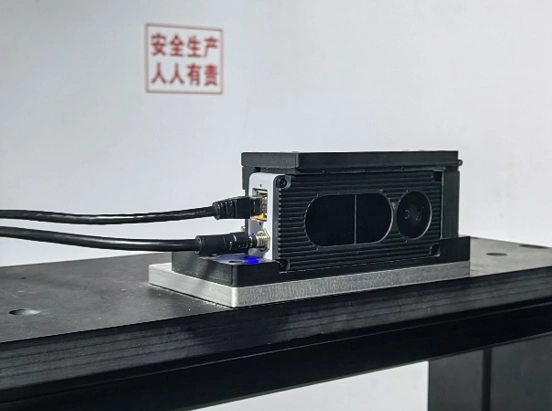
相机位置:安装在钢制夹具上,镜头表面与标定板表面平行。如下图所示:
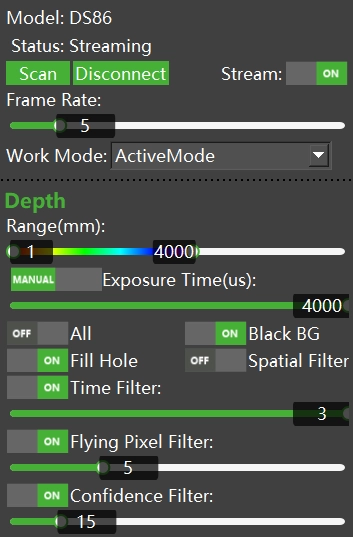
相机设置:默认设置,如下图所示,相机预热20分钟。
成像环境:22°C室温,测试期间室内光线为200lux,一侧使用黑色窗帘,尽量减少周围反射。如下图所示:
测试平台:直线导轨运动平台,平台精度:1mm。
运动平台从0.5米移动到5米,在0.5m、1m、1.5m、2m、2.5m、3m、3.5m、4m、4.5m、5m处停止。每一步测量图像中心10×10像素ROI(感兴趣区域)上的深度,重复32次取平均数值。
测试方法:使用我们自主开发的工具来实时测量和记录深度指标。对于绝对深度值的评估,我们使用图像集中每个像素的平均深度。对于相对深度值的评估,我们使用图像集中每个像素之间的偏差计算(即标准差)。
绝对精度测试
为了获得尽可能准确的结果,3D ToF相机在工厂进行了严格的校准和测试,以保证可靠的准确性。DS系列相机经过校准,测量范围为 0.15~5米。基于上述测试条件的三组数据不同距离的测量误差如下图表所示。基于实际测试的结果可知,测量误差基本保持在毫米级精度,绝对精度<1%。
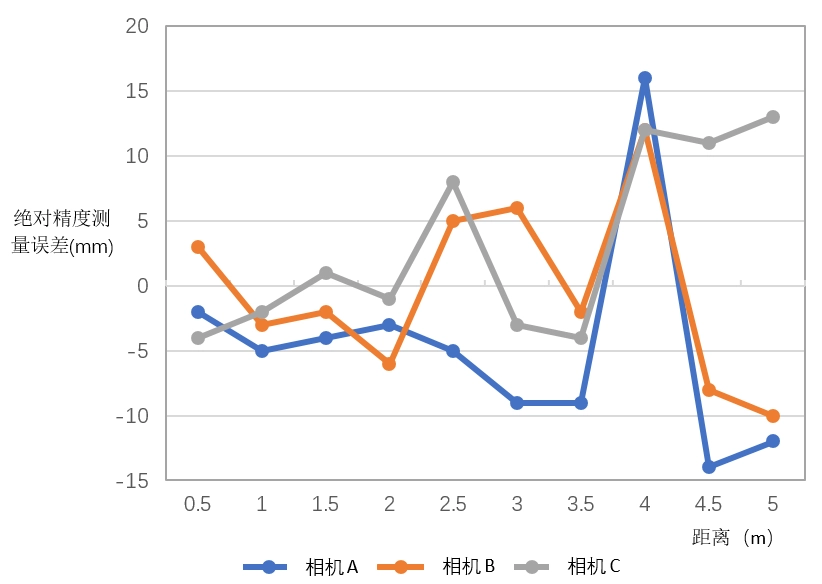
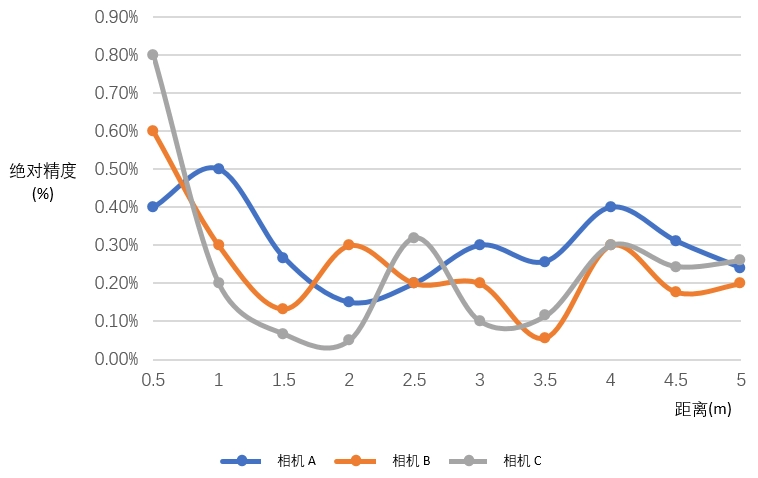
不同距离的绝对精度趋势图如下所示,DS系列相机深度的绝对精度随距离的增加而降低。
相对精度测试
相对精度测量的是特定数量帧上的深度值变动,它也被称为时间噪声或可重复性。相对精度测量的目的是了解深度相机的每像素Z轴精度在同一曝光时间的相关性。它是按像素测量的,然后取ROI的平均值或中值,作为深度值标准差的相对精度数据。基于实际测试的结果可知,测量误差基本保持在毫米级精度,绝对精度<5‰。
相对精度与测试距离的关系
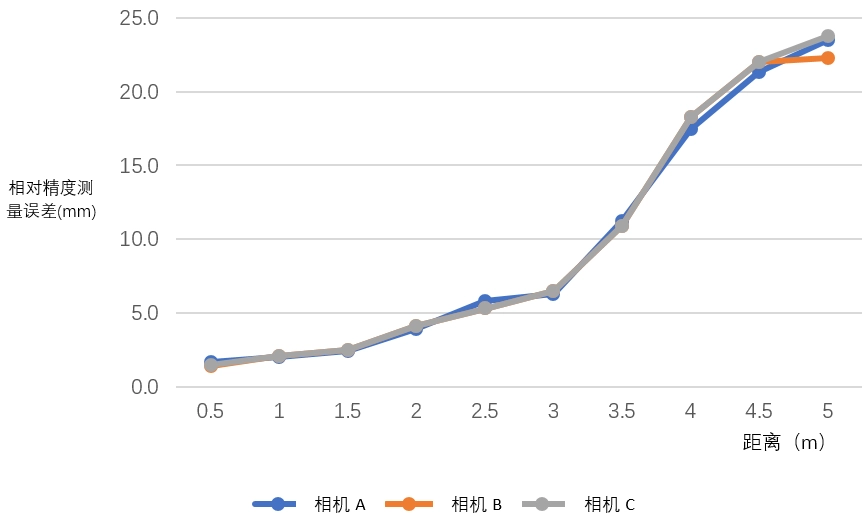
曝光时间1ms的深度质量测试数据趋势图如下所示,DS系列相机深度的相对精度值随距离的增加而增大。
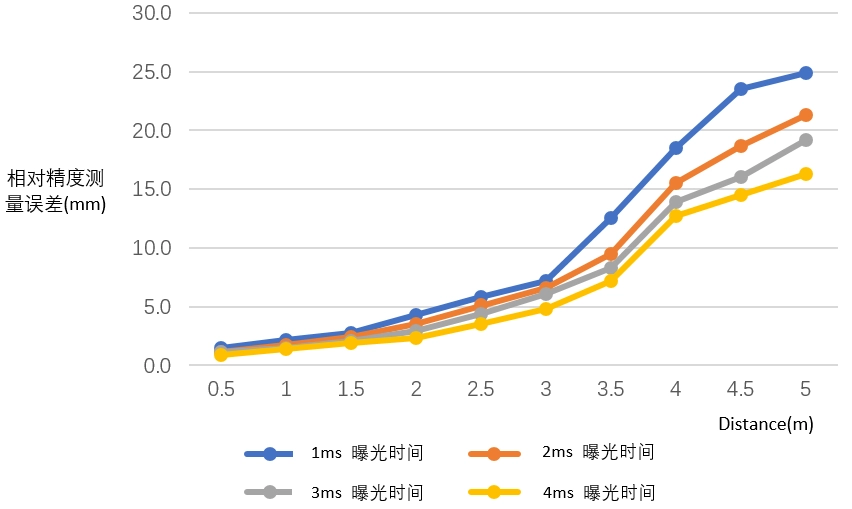
相对精度与曝光时间的关系
为了帮助用户了解影响精度的因素,在每个距离,我们测试了1ms、2ms、3ms和4ms不同曝光时间设置的精度。下面的数据表明,相机设置的曝光时间越长,只要图像不过曝,相机就可以获得越高的精度。
测试结果
下面的表格展示了基于上述测试条件对3台DS86相机的三组深度质量测试结果:
相机A测试结果如下表:
| 测试序列 | 真实值(mm) | 测量值(mm) | 绝对精度测量误差(mm) | 绝对精度(%) | 相对精度测量误差(mm) | 相对精度(%) |
| 1 | 500 | 498 | -2 | -0.40% | 1.7 | 0.34% |
| 2 | 1000 | 995 | -5 | -0.50% | 2.0 | 0.20% |
| 3 | 1500 | 1496 | -4 | -0.27% | 2.4 | 0.16% |
| 4 | 2000 | 1997 | -3 | -0.15% | 3.9 | 0.19% |
| 5 | 2500 | 2495 | -5 | -0.20% | 5.8 | 0.23% |
| 6 | 3000 | 2991 | -9 | -0.30% | 6.3 | 0.21% |
| 7 | 3500 | 3491 | -9 | -0.26% | 11.2 | 0.32% |
| 8 | 4000 | 4016 | 16 | 0.40% | 17.5 | 0.43% |
| 9 | 4500 | 4486 | -14 | -0.31% | 21.3 | 0.47% |
| 10 | 5000 | 4988 | -12 | -0.24% | 23.5 | 0.47% |
相机B测试结果如下表:
| 测试序列 | 真实值(mm) | 测量值(mm) | 绝对精度测量误差(mm) | 绝对精度(%) | 相对精度测量误差(mm) | 相对精度(%) |
| 1 | 500 | 503 | 3 | 0.60% | 1.4 | 0.27% |
| 2 | 1000 | 997 | -3 | -0.30% | 2.1 | 0.21% |
| 3 | 1500 | 1498 | -2 | -0.13% | 2.5 | 0.16% |
| 4 | 2000 | 1994 | -6 | -0.30% | 4.1 | 0.20% |
| 5 | 2500 | 2505 | 5 | 0.20% | 5.3 | 0.21% |
| 6 | 3000 | 3006 | 6 | 0.20% | 6.5 | 0.21% |
| 7 | 3500 | 3498 | -2 | -0.06% | 10.9 | 0.31% |
| 8 | 4000 | 4012 | 12 | 0.30% | 18.3 | 0.45% |
| 9 | 4500 | 4492 | -8 | -0.18% | 22.0 | 0.48% |
| 10 | 5000 | 4990 | -10 | -0.20% | 22.3 | 0.44% |
相机C测试结果如下表:
| 测试序列 | 真实值(mm) | 测量值(mm) | 绝对精度测量误差(mm) | 绝对精度(%) | 相对精度测量误差(mm) | 相对精度(%) |
| 1 | 500 | 496 | -4 | -0.80% | 1.4 | 0.28% |
| 2 | 1000 | 998 | -2 | -0.20% | 2.1 | 0.21% |
| 3 | 1500 | 1501 | 1 | 0.07% | 2.5 | 0.16% |
| 4 | 2000 | 1999 | -1 | -0.05% | 4.1 | 0.20% |
| 5 | 2500 | 2508 | 8 | 0.32% | 5.3 | 0.21% |
| 6 | 3000 | 2997 | -3 | -0.10% | 6.5 | 0.21% |
| 7 | 3500 | 3496 | -4 | -0.11% | 10.9 | 0.31% |
| 8 | 4000 | 4012 | 12 | 0.30% | 18.3 | 0.45% |
| 9 | 4500 | 4511 | 11 | 0.24% | 22.0 | 0.48% |
| 10 | 5000 | 5013 | 13 | 0.25% | 23.8 | 0.47% |