Table of Contents
ToF相机一帧图像处理过程
Goermicro ToF(Time of Flight)相机的一帧图像从产生到传输完成的过程可以概括为如下工作环节:
- 曝光(Exposure)
- 图像处理(ISP processing)
- 网络传输(Transmission)
- SDK处理(SDK processing)
- 应用获取(Program readout)
其中曝光和图像处理是在相机内完成的,SDK处理和应用获取是在主机内完成的。具体过程如下图所示:
曝光时间
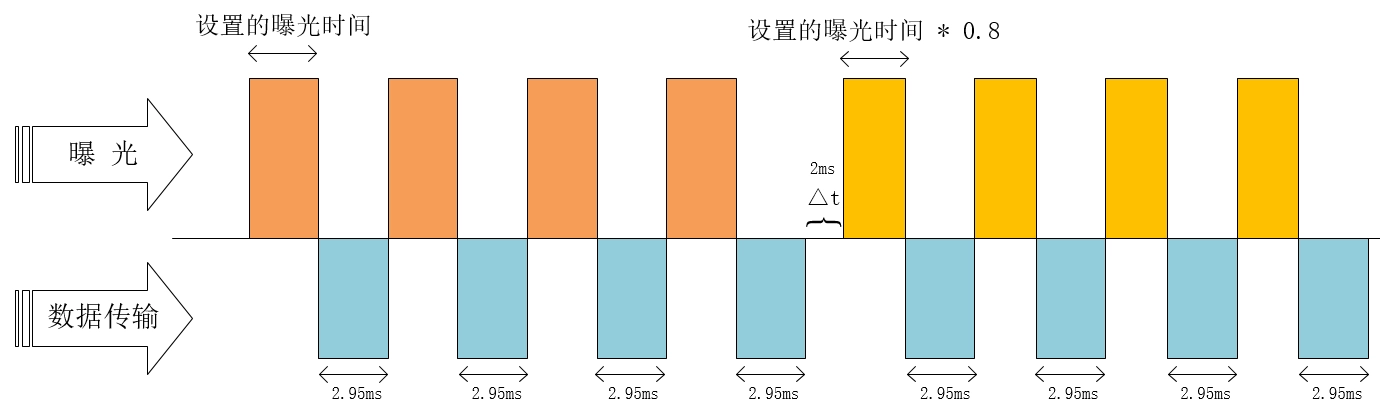
相机的曝光时间包含两部分:曝光和数据传输。
DS系列产品的曝光时间构成
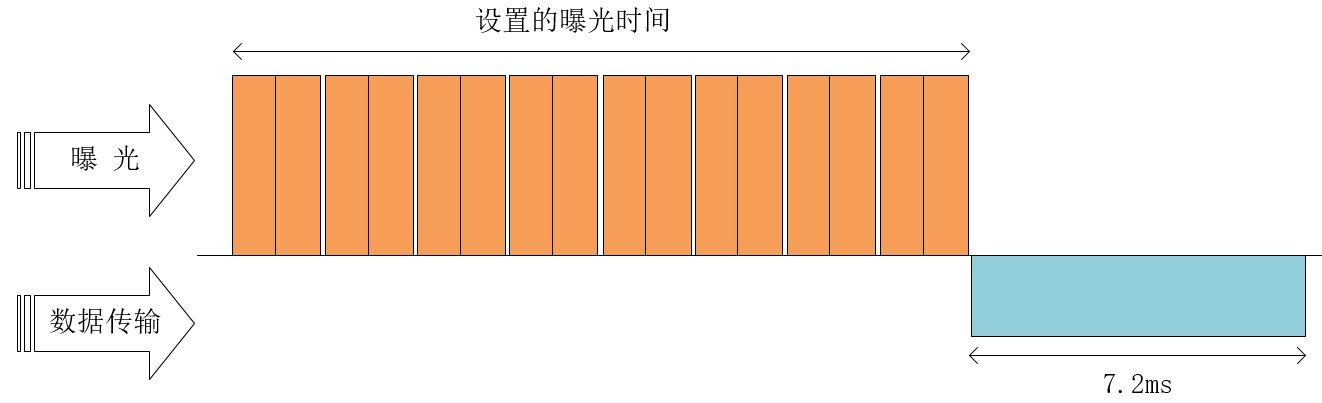
1、不开启HDR,曝光时间构成如下图所示:
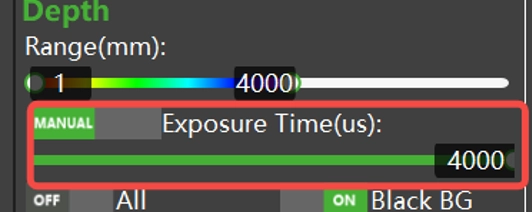
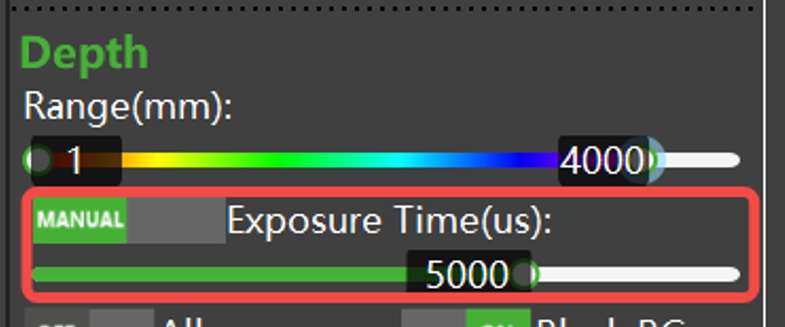
用户可以根据需求在ScepterGUITool工具内进行调节,设置的曝光时间如下所示:
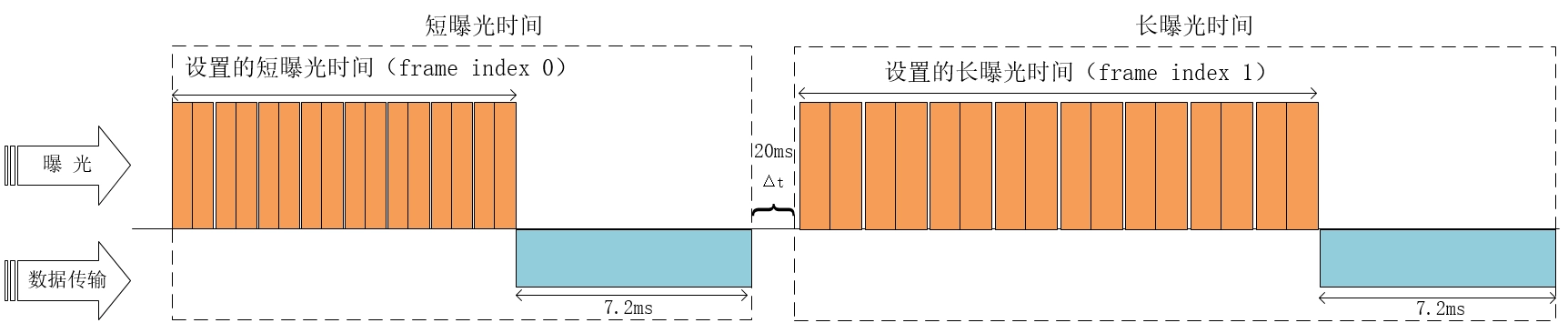
2、开启HDR(参考产品介绍是否支持),曝光时间构成如下图所示:
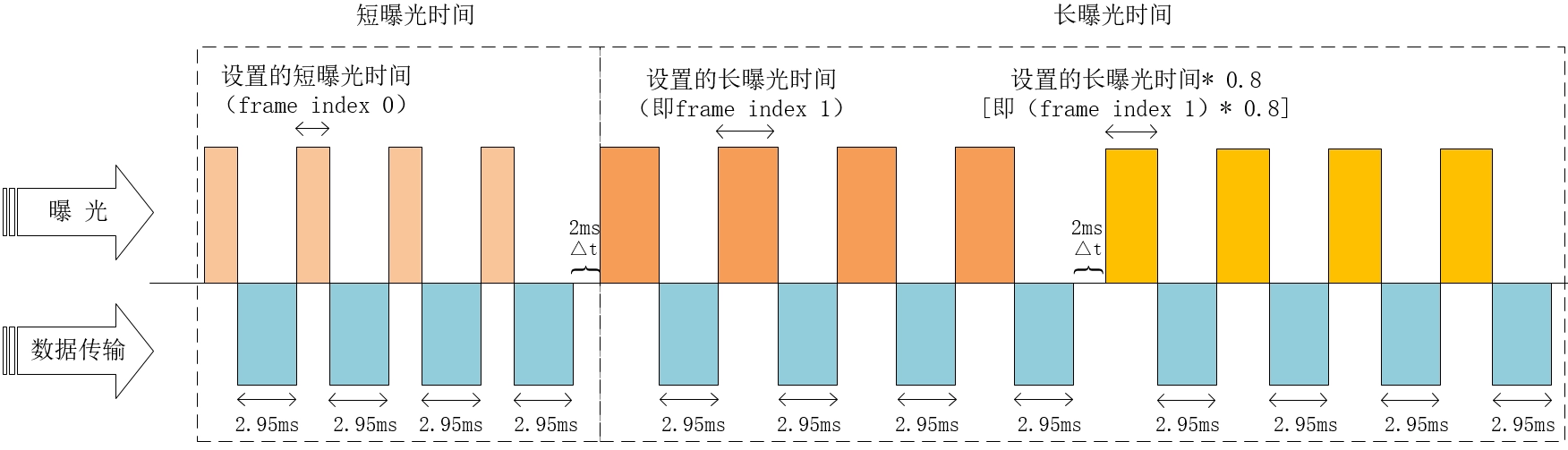
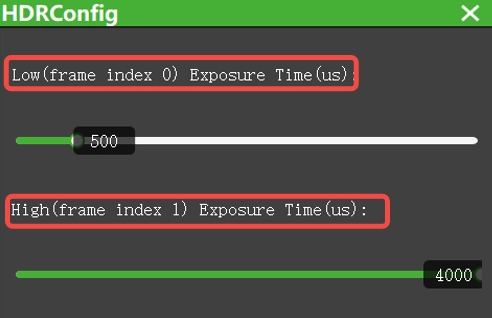
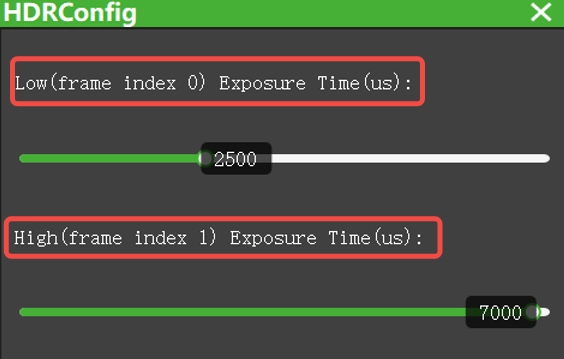
用户可以根据需求在ScepterGUITool工具内进行调节,设置的曝光时间如下所示:
NYX系列产品的曝光时间构成
1、不开启HDR,曝光时间构成如下图所示:
用户可以根据需求在ScepterGUITool工具内进行调节,设置的曝光时间如下所示:
2、开启HDR(参考产品介绍是否支持),曝光时间构成如下图所示:
用户可以根据需求在ScepterGUITool工具内进行调节,设置的曝光时间如下所示:
时间戳和帧号
时间戳
当Vzense ToF相机上电时,系统会启动一个从0开始的本地计时器,时间自动增加,不受相机工作状态的影响,计时器的时间即为相机的本地系统时间。
注意:相机系统时间默认并不是和主机时间对齐的实时时钟real time clock,如需对齐则需要相机和主机之间配置好NTP/PTP模式。请参考《 应用笔记05-Goermicro 3D ToF相机NTP功能设置方式介绍 》和《 应用笔记06-Goermicro 3D ToF相机PTP功能设置方法介绍 》。
相机在每帧曝光结束时,会给每一帧图像打一个时间戳t(Time Stamp),单位为1ms。该时间戳会和该帧图像的数据一起发送到主机端,并可通过API获得。
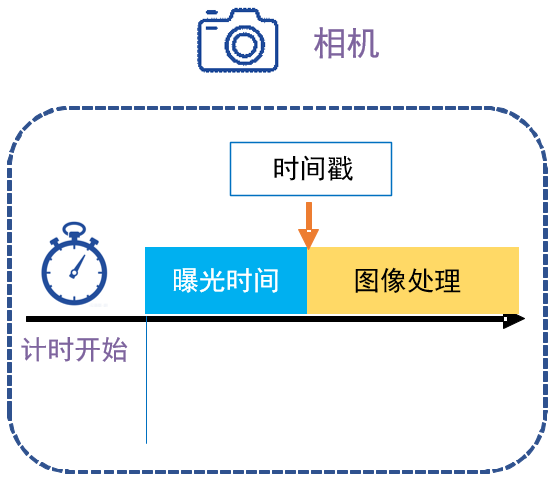
时间戳可以用作相机和主机系统之间的对齐和校准,特别是在触发模式下,可以在应用端知道某一帧的发生时间,避免在计算和传输过程中的不确定延时,从而和系统时间对齐。
帧号
当图像被传送到主机时,主机SDK会给每一帧图像标记一个唯一的帧号(Frame Index),帧号从0开始,按照顺序逐次递加。帧号是由SDK赋值,表示的是SDK接收到图像数据包的索引号。因此与曝光、ISP 处理和传输阶段无关,这意味着,即使在曝光、ISP 处理和传输阶段丢失了帧,帧号仍然是按顺序进行的。
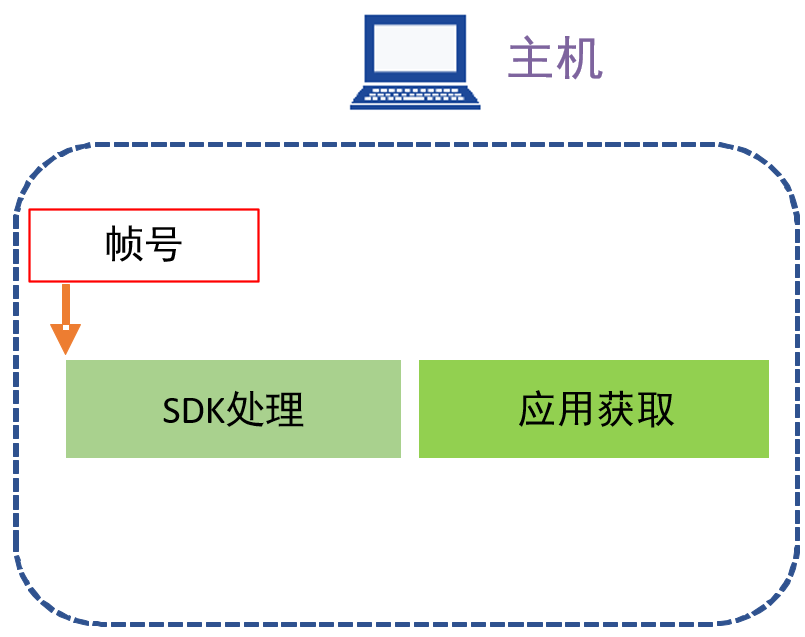
SDK在获取一帧图像后,会把该帧图像暂存在缓存区等待应用读取。如果应用读取不及时,SDK会使用新帧覆盖旧帧,从而产生丢帧。 通过帧号,用户可以判断是否由于主机进程调度、CPU负载过高等原因导致数据丢帧。
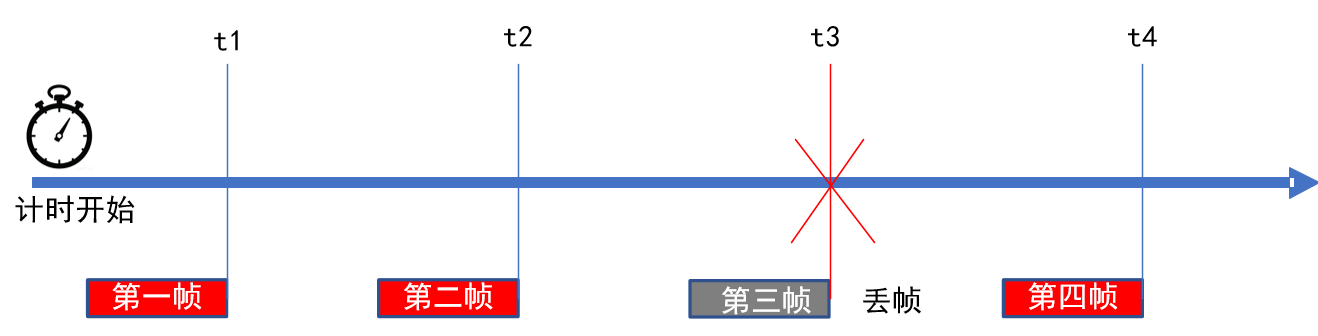
如上图所示,SDK连续接收到了帧号为1,2,4的帧,因此我们就可以知道中间有帧号为3的一帧没有被正确读取到。从帧号的产生原理可以知道,如果发生丢帧,一定是主机端的应用读取发生了问题。
时间戳和帧号的获取
Vzense相机图像的时间戳和帧号都是在ScFrame结构体中
typedef struct
{
uint32_t frameIndex; //表示图像帧索引号
ScFrameType frameType; //表示图像数据类型
ScPixelFormat pixelFormat; //表示像素类型
uint8_t* pFrameData; //表示指向图像数据缓存的指针
uint32_t dataLen; //表示图像数据的长度,单位为字节
uint8_t depthRange; //表示当前帧的深度范围,仅对深度图像有效
uint16_t width; //表示图像宽度
uint16_t height; //表示图像高度
uint64_t deviceTimestamp; //表示帧在设备上生成时的时间戳,不包括帧处理和传输时间
} ScFrame;可以通过scGetFrame接口获取。示例代码如下:
//深度图举例
if (1 == FrameReady.depth)
{
status = scGetFrame(deviceHandle, SC_DEPTH_FRAME, &depthFrame);
if (depthFrame.pFrameData != NULL)
{
cout << "scGetFrame status:" << status << " "
<< "frameType:" << depthFrame.frameType << " "
<< "deviceTimestamp:" << depthFrame.deviceTimestamp << " "
<< "frameIndex:" << depthFrame.frameIndex << endl;
}
}图像延时
图像延时的构成
根据一帧图像的处理过程可知,相机的延时由以下部分组成:
| 功能所在部分 | 功能描述 | 影响因素 | |
| 曝光 | 相机端 | 通过曝光完成一帧图像的采集 | 1、曝光时间设置 2、HDR功能(开启HDR,耗时增加) 3、WDR功能(开启WDR,耗时增加) |
| 图像处理 | 相机端 | 深度图计算、IR图计算、RGB图像转换、 RGB图像编码、图像滤波、畸变还原等工作 | 1、RGB图像分辨率(分辨率越大,耗时越长) 2、深度图像分辨率(分辨率越大,耗时越长) 3、滤波开关(开启滤波,耗时增加) 4、HDR功能(开启HDR,耗时增加) 5、WDR功能(开启WDR,耗时增加) |
| 网络传输 | 相机和主机之间的网络设备 | 从相机传输数据到主机 | 1、网络设备性能(如网卡、网线等) 2、主机网络负载 |
| SDK处理 | 主机端 | 点云转换、图像对齐、RGB图像解码等 | 1、主机性能 2、用户应用程序多线程设计 |
| 应用读取 | 读取 主机端 | 从SDK缓冲区读取图像 | 1、主机性能 2、用户应用程序多线程设计 |
延迟测试方法
以下内容将详细展开并举例说明Vzense相机如何进行延时数据测试。
在下述测试中,会进行两个指标的测试:单帧总延时,除曝光之外的延时(曝光结束到应用获取)。
测试步骤:
1、开启相机的NTP或PTP对时功能。
详细设置方法请参考:NTP设置方法, PTP设置方法。
如果只需要测试单帧总延时,可不进行本步骤。
注意:部分型号相机暂不支持NTP、PTP时钟同步。
2、时间戳打印
例程参考:
BaseSDK/Windows/Samples/Base/NYX650/SingleFrameDelayTest。
(1) Windows
使用ftime函数获取换算毫秒级UNIX时间戳。示例代码如下:
#include <time.h>
/*
省略部分代码
*/
for (int i = 0; i < number; i++)
{
timeb timeStart, timeEnd;
status = scSoftwareTriggerOnce(deviceHandle);
ftime(&timeStart);//记录时间戳开始
if (status == ScStatus::SC_OK)
{
}
else
{
cout << "[scSoftwareTriggerOnce] fail, ScStatus(" << status << ")." << endl;
continue;
}
//如果超过1200ms没有图像传入,该函数将会返回超时
status = scGetFrameReady(deviceHandle, 15000, &frameReady);
if (status == ScStatus::SC_OK)
{
}
else
{
cout << "[scGetFrameReady] fail, ScStatus(" << status << ")." << endl;
continue;
}
//深度图举例
if (1 == frameReady.depth)
{
status = scGetFrame(deviceHandle, SC_DEPTH_FRAME, &depthFrame);
if (status == ScStatus::SC_OK)
{
if (depthFrame.frameIndex % 10 == 0)
{
cout << "SC_DEPTH_FRAME <frameIndex>: " << depthFrame.frameIndex << endl;
}
ftime(&timeEnd);//记录时间戳结束
endTimestamp = timeEnd.time * 1000 + timeEnd.millitm;
startTimestamp = timeStart.time * 1000 + timeStart.millitm;
deviceTimestamp = depthFrame.deviceTimestamp;
frameInterval = endTimestamp - startTimestamp;
frameIntervalNTP = endTimestamp - deviceTimestamp;
//If the delay time is greater than 2000, it is considered that NTP is not enabled.
if (frameIntervalNTP > 2000)
{
csvWriter << depthFrame.frameIndex << "," << frameInterval << ",N/A" << endl;
}
else
{
csvWriter << depthFrame.frameIndex << "," << frameInterval << "," << frameIntervalNTP << endl;
}
}
else
{
cout << "[scGetFrame] fail, ScStatus(" << status << ")." << endl;
}
}
//The time interval between two triggers should be greater than
//the time interval between the two frames generated.
this_thread::sleep_for(chrono::milliseconds(1000 / frameRate));
}(2)Linux
使用clock_gettime函数获取换算毫秒级UNIX时间戳。示例代码如下:
#include <time.h>
/*
省略部分代码
*/
for (int i = 0; i < number; i++)
{
timespec timeStart, timeEnd;
status = scSoftwareTriggerOnce(deviceHandle);
clock_gettime(CLOCK_REALTIME, &timeStart);//记录时间戳开始
if (status == ScStatus::SC_OK)
{
}
else
{
cout << "[scSoftwareTriggerOnce] fail, ScStatus(" << status << ")." << endl;
continue;
}
//如果超过1200ms没有图像传入,该函数将会返回超时
status = scGetFrameReady(deviceHandle, 15000, &frameReady);
if (status == ScStatus::SC_OK)
{
}
else
{
cout << "[scGetFrameReady] fail, ScStatus(" << status << ")." << endl;
continue;
}
//深度图举例
if (1 == frameReady.depth)
{
status = scGetFrame(deviceHandle, SC_DEPTH_FRAME, &depthFrame);
if (status == ScStatus::SC_OK)
{
if (depthFrame.frameIndex % 10 == 0)
{
cout << "SC_DEPTH_FRAME <frameIndex>: " << depthFrame.frameIndex << endl;
}
clock_gettime(CLOCK_REALTIME, &timeEnd);//记录时间戳结束
endTimestamp = timeEnd.tv_sec * 1000 + timeEnd.tv_nsec/1000000;
startTimestamp = timeStart.tv_sec * 1000 + timeStart.tv_nsec/1000000;
deviceTimestamp = depthFrame.deviceTimestamp;
frameInterval = endTimestamp - startTimestamp;
frameIntervalNTP = endTimestamp - deviceTimestamp;
//If the delay time is greater than 2000, it is considered that NTP is not enabled.
if (frameIntervalNTP > 2000)
{
csvWriter << depthFrame.frameIndex << "," << frameInterval << ",N/A" << endl;
}
else
{
csvWriter << depthFrame.frameIndex << "," << frameInterval << "," << frameIntervalNTP << endl;
}
}
else
{
cout << "[scGetFrame] fail, ScStatus(" << status << ")." << endl;
}
}
//The time interval between two triggers should be greater than
//the time interval between the two frames generated.
this_thread::sleep_for(chrono::milliseconds(1000 / frameRate));
}执行结果如下:
通过上述方法可以多次测试并统计当前系统的延时,可以在生成的”SingleFrameDelayTest.csv“文件中进行查看,如下表所示:
| frameIndex | TotalDelay | ExcludeDelayofExposure |
| 1 | 98 | 42 |
| 2 | 107 | 52 |
| 3 | 117 | 62 |
| 4 | 112 | 57 |
| 5 | 110 | 55 |
| 6 | 93 | 38 |
| 7 | 103 | 47 |
| 8 | 89 | 34 |
| 9 | 113 | 57 |
| 10 | 111 | 55 |
通过生成数据得知此次测试(10帧图像)的两个测试指标如下:
(a)单帧总延时:105ms左右。
(b)除曝光之外的延时时间为50ms左右。
Vzense ToF相机延时测试数据
以NYX650(B26) + ScepterSDK(v24.12.2)为例,ToF曝光时间5ms, RGB分辨率640 x 480,开Depth2RGB对齐,获取对齐后Depth与RGB图像延时测试数据如下表所示:
| 平台 | 曝光+数据传输 | 图像处理 (固定) | 网络传输 | SDK处理 | 总延时 |
| RK3588 | 13ms | 65ms | 20ms | 36ms | 134ms |
| Nvidia Xavior NX | 13ms | 65ms | 10ms | 30ms | 118ms |
DS系列产品的延迟相对于NYX会更高一些。以DS86(B21) + ScepterSDK(v24.12.2)为例,ToF曝光时间4ms, RGB分辨率640 x 480,开Depth2RGB对齐,获取对齐后Depth与RGB图像延时测试数据如下表所示:
| 平台 | 曝光+数据传输 | 图像处理 (固定) | 网络传输 | SDK处理 | 总延时 |
| RK3588 | 56ms | 84ms | 38ms | 47ms | 225ms |
| Nvidia Xavior | 56ms | 84ms | 22ms | 41ms | 203ms |
延时优化
如果在测试后发现,整体延时无法满足应用需求,可以从如下几个角度进行调节优化:
1、图像分辨率:图像分辨率越大,需要处理的数据量越大,因此分辨率的不同对延时影响最为巨大。建议在业务允许的情况下,选择较小的分辨率,如640×480。
2、系统平台:系统平台的性能直接影响SDK的运行效率与性能,因此尽量选择符合要求的平台,以及尽量平衡其他进程对相机SDK资源的抢占。
3、点云转换:点云转换涉及大量float运算,消耗较大,尽量减少点云转换的数量可以较大的提高效率。如只转换ROI(region of interest)区域点云,不做全图转换。
4、滤波开关:根据业务需求,可以关闭部分滤波开关,以减少资源占用与提高延时。
5、相机型号:Vzense相机有不同型号,不同型号相机因为原理不同,实现方式不同,也会存在延时差异。