在全球供应链与物流行业快速发展的今天,运输与仓储规模不断扩大。为了实现更高效、更安全的搬运,自动化技术正以前所未有的速度普及。作为搬运环节中的核心工序,**拆码垛(Depalletizing & Palletizing)**不仅决定着作业效率,也直接影响到整个物流体系的稳定性。
Table of Contents
一、什么是拆码垛?
在物流和仓储作业中,拆码垛常常被作为一个整体概念。但实际上,它包含两个方向完全相反的过程`:
- 码垛(Palletizing):将散件货物按照一定的规则,精准地堆叠成一个完整、规则的托盘。
- 拆垛(Depalletizing):从堆叠好的托盘中逐件识别、分拣和搬运货物。
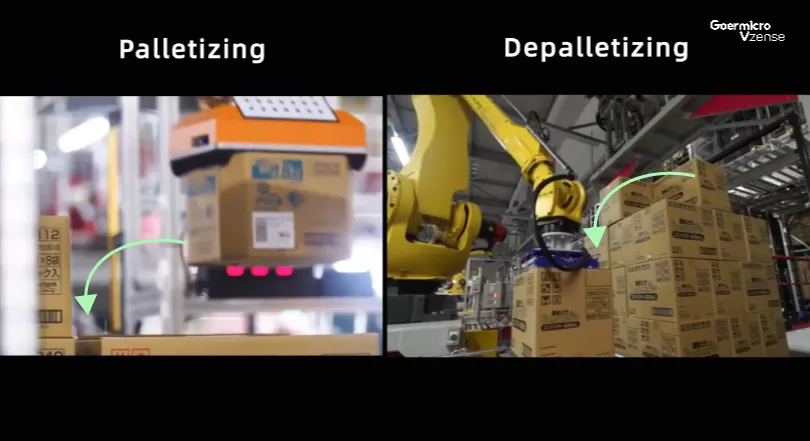
从作业难度来看,拆垛要远远复杂于码垛。码垛通常在规则场景下进行,而拆垛往往需要应对动态多变的现实环境,例如:
- 不同尺寸、形态的物品;
- 遮挡严重、目标不完整可见;
- 货物偏移、错位堆放;
- 光照、反光等外部干扰。
这些因素让拆垛成为智能物流领域的一大挑战。
二、常见的机器视觉方案对比
在自动化拆码垛中,视觉感知系统是“眼睛”和“大脑”的结合体,决定了机器人能否精准识别与抓取目标。目前常见的视觉技术包括:
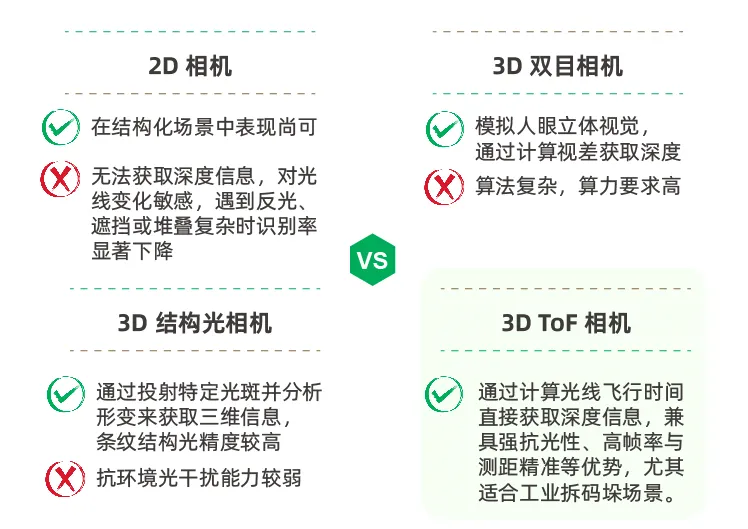
1. 2D 相机
二维相机在规则、结构化场景中表现尚可,但在真实复杂的物流现场,难以处理遮挡与深度信息,导致识别精度不足。
2. 双目相机
通过两台相机模拟人眼视觉来获得深度信息。优势是成本较低,但在远距离、大体积场景中精度有限,且容易受光照干扰。
3. 结构光相机
结构光适合对静态物体进行高精度测量,应用于小范围、高精度场景。然而在户外强光、反射或高速运动环境中,稳定性不足。
4. 3D ToF 相机
ToF(Time-of-Flight,飞行时间)相机通过光脉冲测距来获取物体的三维信息,具备强抗光性、适合大场景动态识别、适配不规则物体等优势,成为拆码垛的理想选择。
三、为什么选择歌尔微电子 3D ToF RGB-D 相机?
作为深耕 3D 感知领域的企业,**歌尔微电子(Goermicro)**自主研发的 3D ToF RGB-D 相机在拆码垛场景中展现出显著优势:
- 强抗光性:无惧户外环境和复杂光照;
- 工业级鲁棒性:能够在高强度作业下保持长期稳定运行;
- 精准处理不规则包裹:轻松应对各种异形、非标物体,适配复杂物流需求。
这些优势使其成为物流、制造和仓储行业自动化升级的核心设备之一。
四、智能拆垛算法的赋能
仅有硬件还不够,算法才是赋予机器“智慧”的关键。歌尔微电子同步研发的自主拆垛算法,能够:
- 快速识别复杂堆叠中的目标货物;
- 规划出最优抓取路径;
- 显著提升作业效率与安全性。
通过“相机 + 算法”的结合,拆垛机器人得以真正实现智能化操作。
五、未来展望:让人从繁重劳动中解放
自动化拆码垛的终极目标,是将人从高强度、重复性、危险性的体力劳动中解放出来,让机器承担更多繁重的作业。随着 3D ToF 技术的持续迭代,我们有理由相信,未来的智能物流将更加高效、安全和智能。
结语:
歌尔微电子将持续以创新的 3D 感知技术,推动物流与制造业的自动化升级。如果您关注 3D ToF 前沿技术与应用,欢迎持续关注我们的最新动态。