Table of Contents
一、从“汗滴花下土”到“机器人采摘”
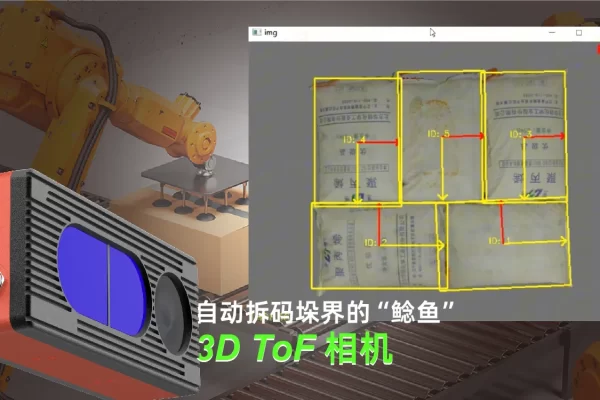
3D ToF 相机为何能为智慧农业带来变革性进步?今天让我们来看一个新鲜的案例。
广西南宁,被誉为“中国茉莉花之都”,茉莉花产量占全国八成。这朵“东方玫瑰”香飘全球,是城市甜蜜的黄金名片。

茉莉花盛放的花期在每年8月,正好是广西的盛夏时节,炙热的阳光烘烤着大地,采摘人员冒着酷暑在毫无庇荫的茉莉花田里劳作。
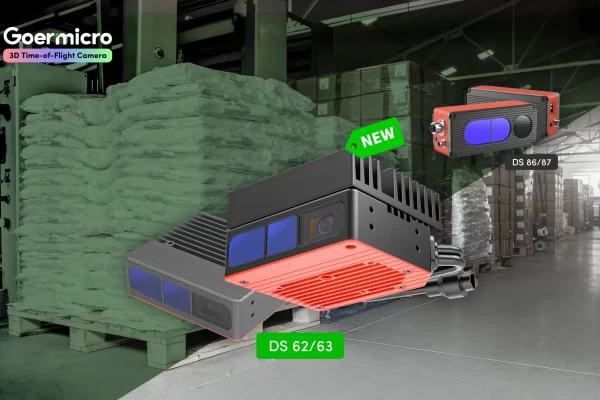
为了解决这一难题,国内一流高校的科研团队,基于歌尔微电子(Goermicro)3D ToF相机 DS 系列,成功研发出一套茉莉花自动化采摘系统。目前可行性实验完美通过,即将进入量产。

这套系统通过3D视觉精准识别花朵的位置与开放程度,智能机械臂即可在数秒内完成“锁定—伸展—采摘—收集”的全过程。实地测试结果显示:
- 识别准确率达98%以上;
- 采摘成功率超过90%;
- 即使在清晨露水或傍晚光线变化下,系统依然保持稳定运行。
该项目不仅展示了3D ToF相机在复杂农业环境中的强大感知能力,也标志着中国茉莉花种植首次实现了规模化自动化采摘的技术突破。
二、智慧农业对自动采摘的需求
随着全球农业劳动力逐年减少,以及对作物品质一致性要求的提高,“按需采摘、田间分选”成为现代农业的重要方向。
传统人工采摘存在以下痛点:
- 效率低、成本高:大量人力依赖。
- 精度不足:难以判断花朵成熟度。
- 品质不均:采摘过程易造成花朵破损。
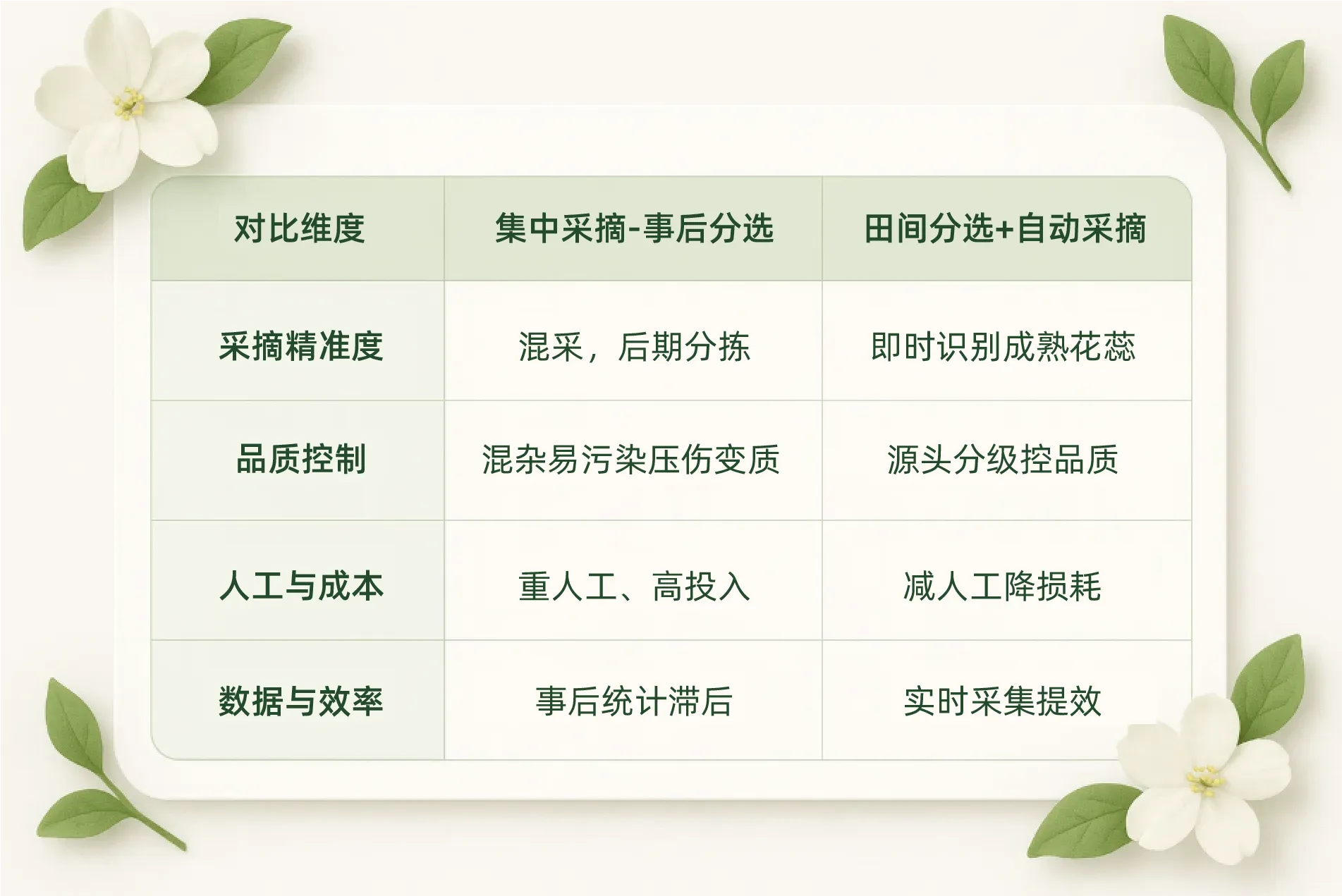
自动化采摘系统的出现,正是为了解决这些问题。它不仅能提升产量与一致性,还能通过视觉分级系统,在采摘前就筛选出最合格的花朵,实现“采即精品”。
三、2D视觉的局限与3D ToF相机的突破
早期自动化采摘多依赖2D相机进行识别,但2D技术存在天然限制:
- 受光照影响明显,阴影与反光易干扰识别;
- 缺乏深度信息,无法精确定位花朵高度;
- 遮挡难处理,茉莉花常被叶片掩盖,识别率下降。
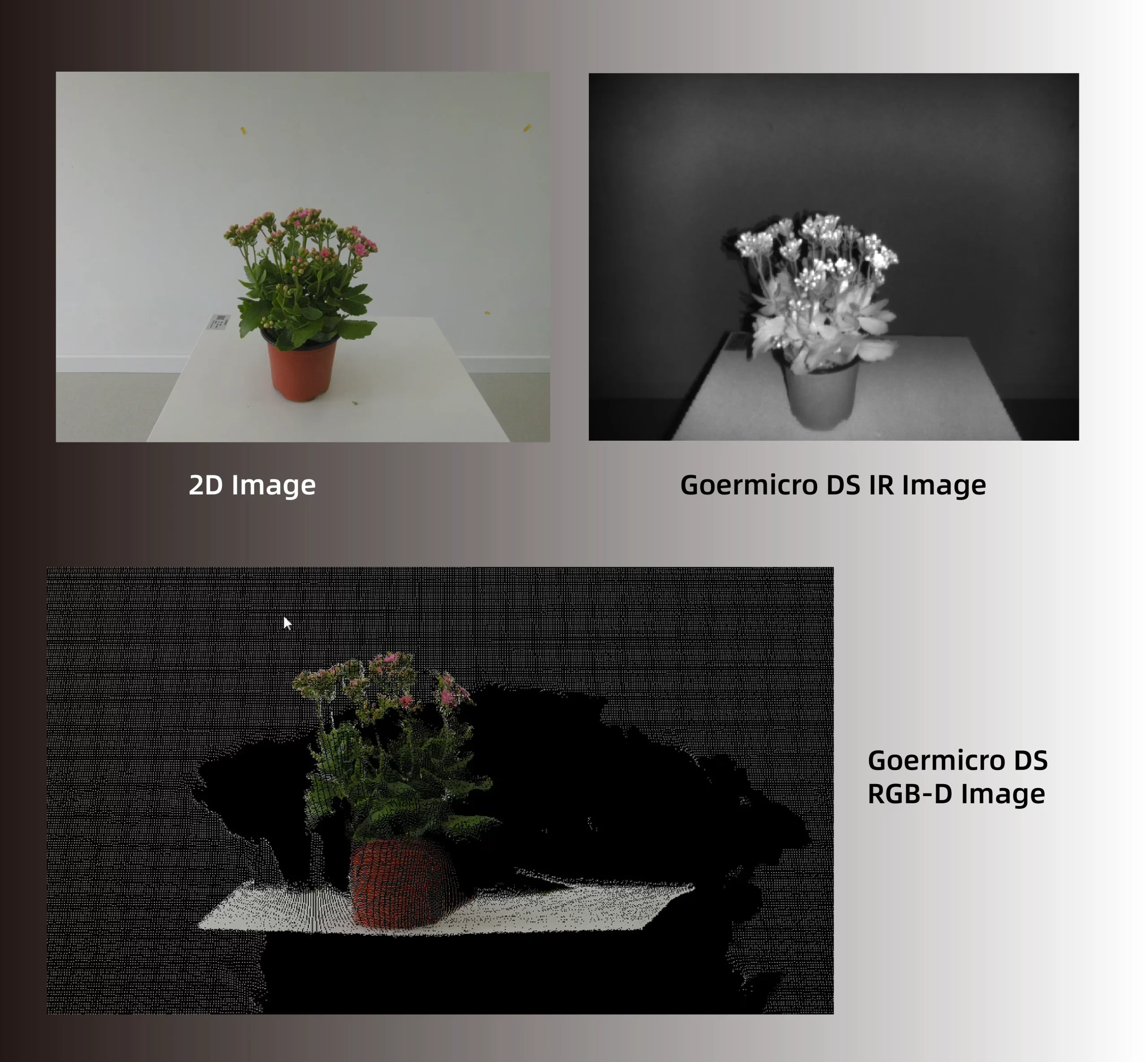
3D ToF相机(Time-of-Flight)的出现,为这一难题提供了革命性解决方案。
它通过发射近红外光脉冲并测量光飞行时间,生成完整的深度图像,从而精确获取茉莉花在三维空间中的坐标(X, Y, Z)。
这使系统能够:
- 精准识别每朵花的位置、大小与开放度;
- 智能规划机械臂采摘路径;
- 柔性控制力度,避免损伤花瓣。
3D ToF 飞行时间深度相机的稳定性使得机器人即使在户外强光、阴影或露水环境中,也能可靠运行。
四、3D ToF相机对比其他3D 技术
为更直观地理解不同3D视觉技术在农业场景中的表现,以下为双目视觉、结构光与3D ToF三种方案的关键性能对比:
| 对比维度 | 双目视觉 (Stereo Vision) | 结构光 (Structured Light) | 飞行时间 (Time-of-Flight) |
| 深度精度 | 中等,依赖图像纹理 | 高,适用于静态测量 | 高且稳定,适合动态场景 |
| 环境适应性 | 弱,受光照干扰大 | 中等,受强光限制 | 强,几乎不受自然光影响 |
| 实时性能 | 一般,计算量大 | 较快,受投影刷新率限制 | 快速,毫秒级响应 |
| 系统复杂度 | 高,双相机需严格标定 | 中,需光源与相机同步 | 低,单相机结构,易于集成 |
| 适用场景 | 室内、实验环境 | 工业检测、固定物体 | 农业采摘、物流识别、无人驾驶 |
五、结论与展望
3D ToF视觉与智能机器人结合的采摘系统,正成为智慧农业的核心技术突破口。
以茉莉花为代表的高附加值经济作物,正在从“人工经验采摘”迈向“机器视觉采摘”的新阶段。
未来发展方向包括:
- 多模态感知融合(ToF + RGB + Hyperspectral),提升识别鲁棒性;
- 轻量化与低功耗平台优化,适应农田作业环境;
- AI自学习模型,根据不同花期与光照动态调整采摘策略。
随着算法与硬件的持续进化,3D ToF技术将成为连接自然与机器的关键感知桥梁,为中国智慧农业的全球化竞争注入新的技术动能。