机器视觉场景中相机与机器人的标定影响着数据的准确性,那么选取正确的相机坐标就十分重要,本文详细介绍了Goermicro 3D ToF相机坐标如何选取。
Table of Contents
什么是相机坐标的原点?
相机坐标系的原点是相机的镜头中心,x轴与y轴与图像的X,Y轴平行,z轴为相机光轴,它与图像平面垂直,实际场景应用中,用户根据相机坐标的原点正确安装相机的位置,可以在相机视场内获得更多的图像数据,有利于机械臂进行抓取等工作。
Goermicro 3D ToF相机坐标的原点
Goermicro 3D ToF相机包含RGB相机和ToF(Time of Flight)相机,如下图所示:
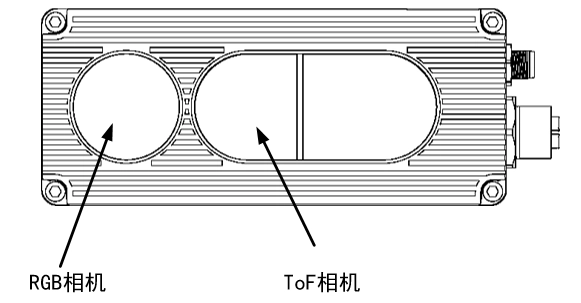
每一个相机都有一个坐标系,分别是ToF坐标系和RGB坐标系,用户可以根据需求选择任意一个坐标系作为相机坐标系。
1、如果使用ToF坐标系作为相机坐标系,则坐标系的原点位置如下图所示:
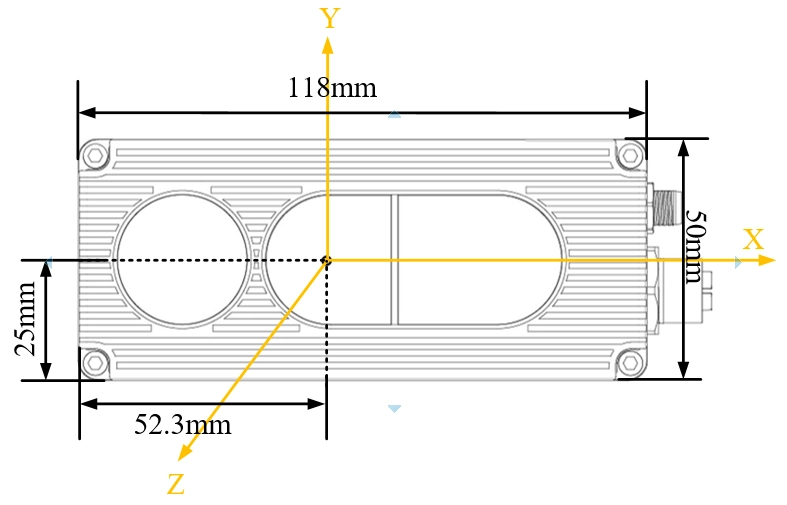
X 轴的坐标原点位于距离产品下边沿25mm 的位置;
Y 轴的坐标原点位于距离产品左边沿52.3mm 的位置;
Z 轴的坐标原点位于镜片的前表面。
2、如果使用RGB坐标系作为相机坐标系,则坐标系的原点位置如下图所示:
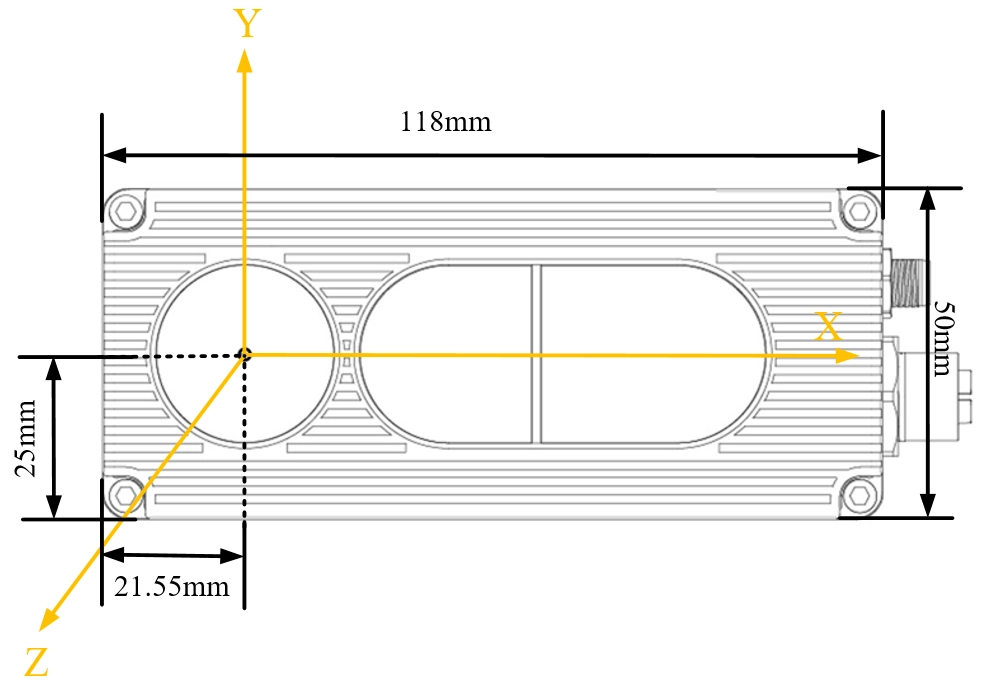
X 轴的坐标原点位于距离产品下边沿25mm 的位置;
Y 轴的坐标原点位于距离产品左边沿21.55mm 的位置;
Z 轴的坐标原点位于镜片的前表面。
什么是相机主点坐标(Cx,Cy)?
相机主点坐标是图像传感器的中心。
Goermicro 3D ToF相机主点坐标获取
相机出厂前需要进行标定设置,该设置会将相机内参信息写入相机内部。用户可以通过API获取当前相机的内参信息,得到相机主点坐标。
ScStatus scGetSensorIntrinsicParameters(ScDeviceHandle device, ScSensorType sensorType, ScSensorIntrinsicParameters* pSensorIntrinsicParameters);
typedef struct
{
double fx; //!< Focal length x (pixel).
double fy; //!< Focal length y (pixel).
double cx; //!< Principal point x (pixel).
double cy; //!< Principal point y (pixel).
double k1; //!< Radial distortion coefficient, 1st-order.
double k2; //!< Radial distortion coefficient, 2nd-order.
double p1; //!< Tangential distortion coefficient.
double p2; //!< Tangential distortion coefficient.
double k3; //!< Radial distortion coefficient, 3rd-order.
double k4; //!< Radial distortion coefficient, 4st-order.
double k5; //!< Radial distortion coefficient, 5nd-order.
double k6; //!< Radial distortion coefficient, 6rd-order.
} ScSensorIntrinsicParameters;可以参考例程:
\BaseSDK\Windows\Samples\Base\DS87\DeviceParamSetGet。
1、如果使用ToF坐标系作为相机坐标系,就需要使用ToF相机内参中的主点坐标,调用形式如下:
ScSensorIntrinsicParameters cameraParameters;
status = scGetSensorIntrinsicParameters(deviceHandle, SC_TOF_SENSOR, &cameraParameters);2、如果使用RGB坐标系作为相机坐标系,就需要使用RGB相机内参中的主点坐标,调用形式如下:
ScSensorIntrinsicParameters cameraParameters;
status = scGetSensorIntrinsicParameters(deviceHandle, SC_COLOR_SENSOR, &cameraParameters);如何获取目标物体在相机坐标系下的三维坐标(即点云转换)?
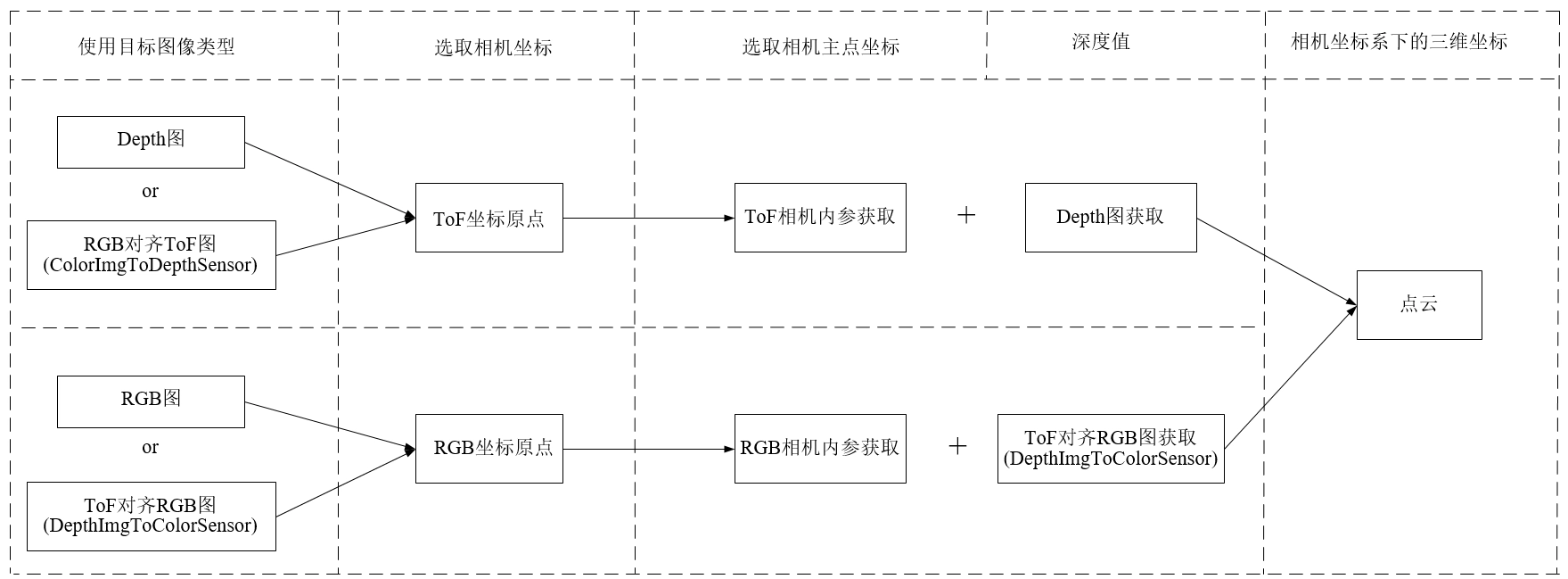
点云转换是将深度图像中的每个像素点转换为三维空间中的点,点云转换需要使用相机主点(Cx,Cy)和深度值。因此,根据目标图像类型选取正确的相机坐标系、相机主点是获取相机坐标下三维坐标数据的关键。