在科学和技术术语中,iToF 是 Indirect Time-of-Flight 的缩写。iToF 的工作原理是相机自身向真实物理场景发射调制的红外光信号,传感器接收从测量物体返回的光信号,通过测量相位偏移来计算测量光的飞行时间,从而实现距离测量。目前的 iToF 有两种技术原理,基于连续波(Continuous Wave)方法和脉冲波(Pulse)方法。在本文中,让我们了解一下它们各自的技术原理。
Table of Contents
基于连续波(Continuous Wave, CW)技术的介绍
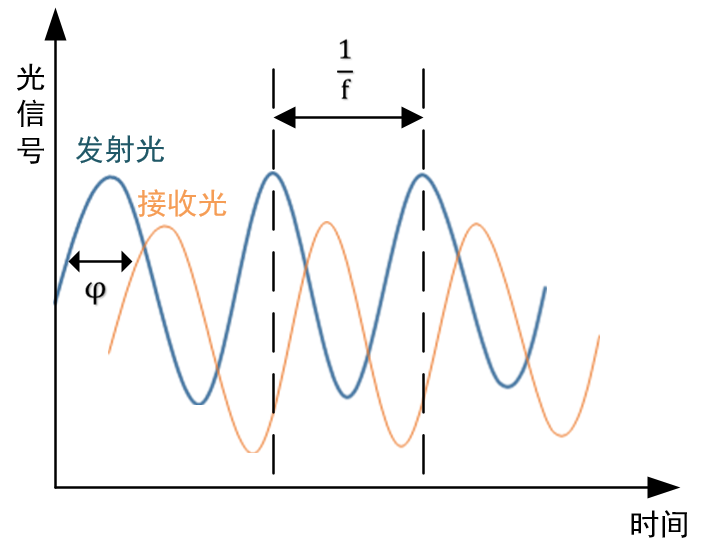
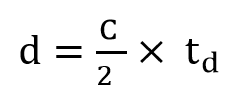
连续波 iToF 的基本原理是通过将光调制成一定频率 f 的方波,测量发射和接收周期之间的相位偏移,从而通过计算相位偏移来测量距离。假设光速为 C,一个周期的相位偏移为 φ,则从发射端到物体的距离公式可以表示为:

如何计算相位偏移(φ)?
以单频正弦函数为例,发射波和接收波之间的关系如下图所示:

假设发射波形的公式为:

接收到的波形方程为:

φ表示从发射时间到接收时间的相位偏移,光的传播时间可以很容易地从φ计算出来。由于难以直接测量光速,相机将激光发射器调制成四个不同时间偏移的相位能量图,分别为 0°、90°、180°、270°,四个不同相位接收窗口捕获的能量如下所示:
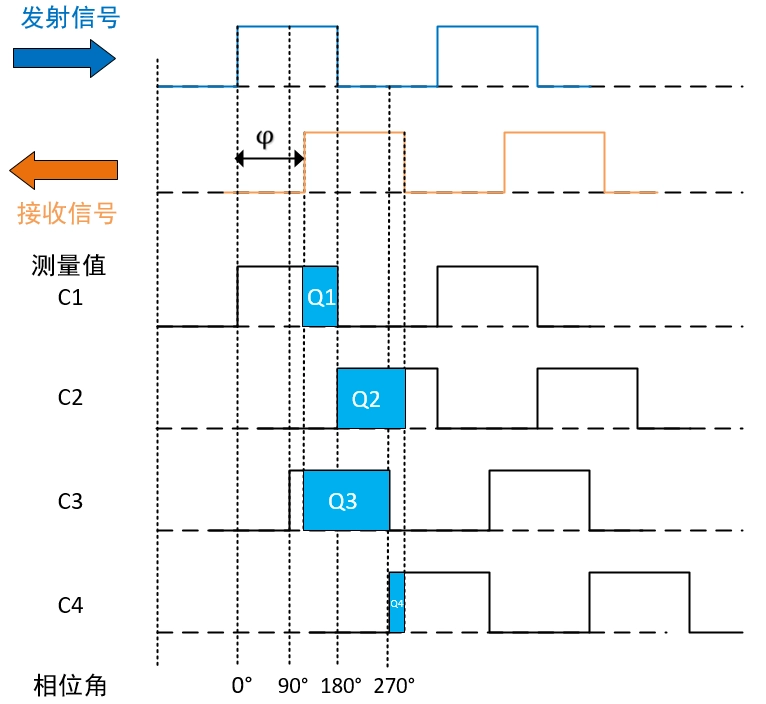
积分能量值为:
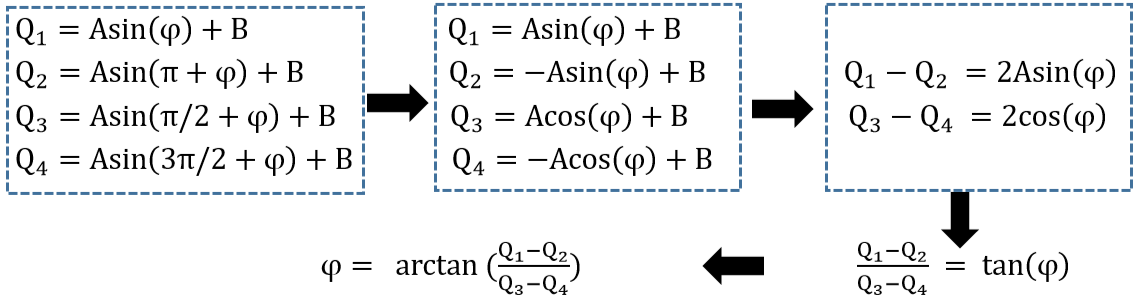
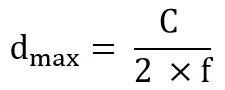
将 φ 代入方程 d 中,得到距离,从这个 (0 ≤ φ ≤ 2π) 可以看出,可以获得的测量范围是 [0 ~ dmax = 2π],当 φ=2π 取理论最大值时,最大值为:
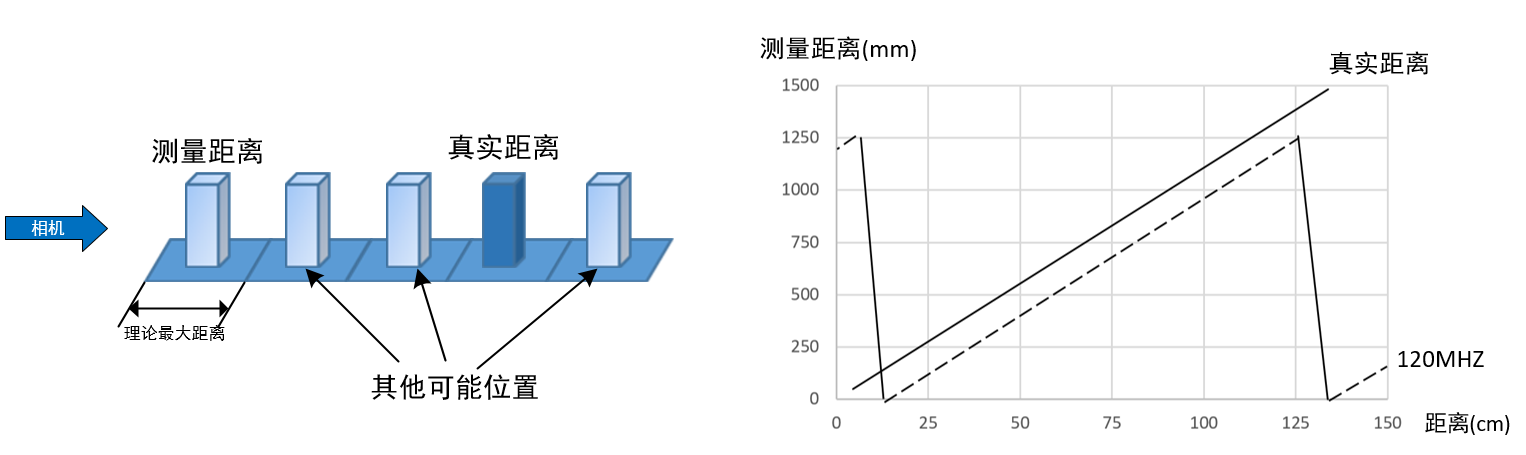
CW-iToF存在的缺陷
由于在使用连续波间接飞行时间(CW-iToF)系统时用于照亮场景的光具有调制特性,可以根据所使用的调制频率确定特定范围。当光往返的时间大于调制光的周期时,它们产生具有相同的相角,从而距离计算将会出错,无法区分来自远处和近处的信号,从而无法确定目标位于哪个周期。这将产生一种称为“距离混叠”的现象。以 120MHZ 为例,常用频率和理论最大值为:

常见频率和理论最大值,如下表所示:
| 频率 | 100MHZ | 80MHZ | 60MHZ | 20MHZ | 15MHZ | 10MHZ |
| 最大测量范围 | 1.5m | 1.875m | 2.5m | 7.5m | 10m | 15m |
基于脉冲波(Pulse)的技术的介绍
P-iToF 的基本原理是发射重复的脉冲信号并分析脉冲信号的相位以获得深度。假设光速为C,飞行时间为td,那么距离公式为:

飞行时间的获取td
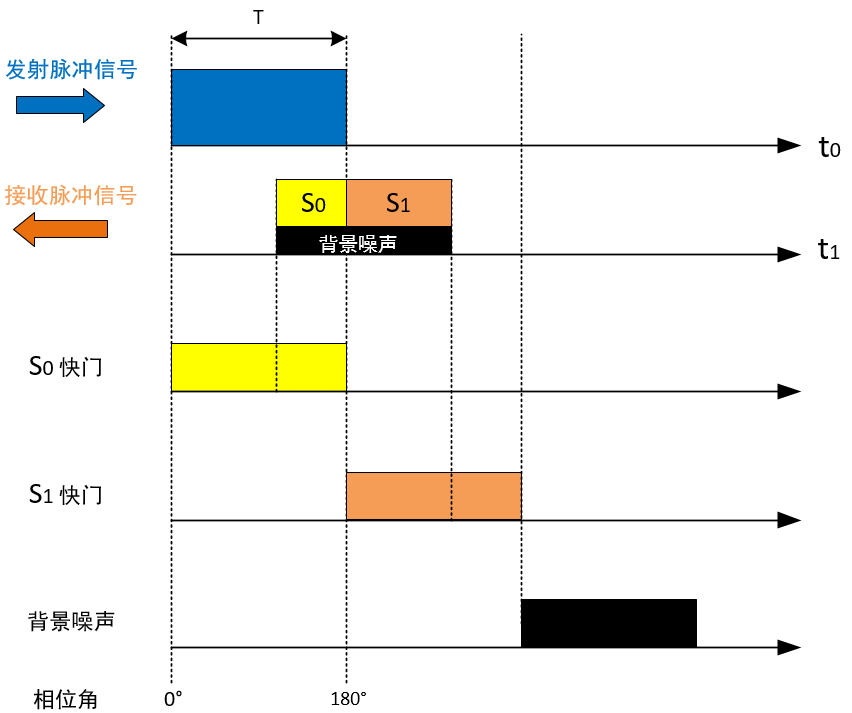
P-iToF通过双重采样技术提高了精度。相机需要将激光发射端调制成具有不同时间偏移的两个相位能量图,分别为0°和180°,此外,在没有光脉冲发射时开启,只收集背景光信号。如下图所示:
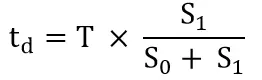
根据相应的比例,可以计算出飞行时间 td:
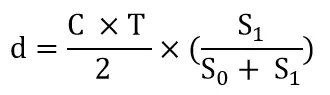
将飞行时间 td带入公式 d 中,可以得到距离:
包含背景光信号的距离计算公式如下:

两种技术对比
| 连续波技术 | 脉冲波技术 | |
| 功耗 | 低 | |
| 抗光性 | 好 | |
| 帧率 | 高 | |
| 绝对精度和相对精度 | 高 | |
| 抖动 | 小 |