ToF系统通过调制红外光的发射和接收之间的时间差来测量距离。假设发射频率为f的调制光,光速为C,在一个周期内,我们可以测量最大范围dmax=c/2f。我们可以调整频率以获得所需的测量距离。随着频率的增加,精度会更高,但频率的增加会导致测量范围的缩小。过周期发生在调制光的第一个周期发射到远处目标物体时,第一个周期的调制光返回并被检测到,而此时第二个周期的调制光已经发射,使得传感器无法区分接收到的是哪个周期的调制光。这种现象我们称之为“距离混叠(range aliasing)”,其他学者也称之为“距离折叠(range folding)”或“模糊范围(unambiguous range)”或“二次回波(second-trip echo)”或“相位缠绕(phase wrap)”,在本文中,让我们进一步了解过周期现象。
Table of Contents
ToF相机中过周期现象举例
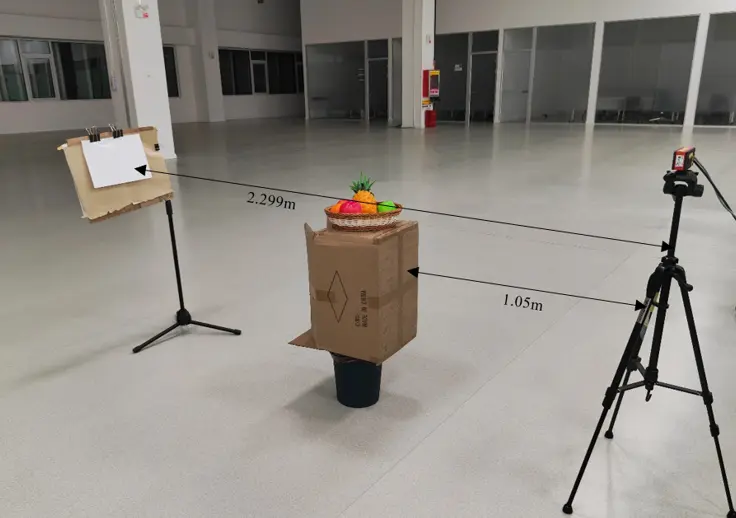
当前相机频率为120MHz,最大测量距离为1.249米。现在将物体A放置在距离相机1.05米处,将物体B放置在距离相机2.299米处,如下图所示:
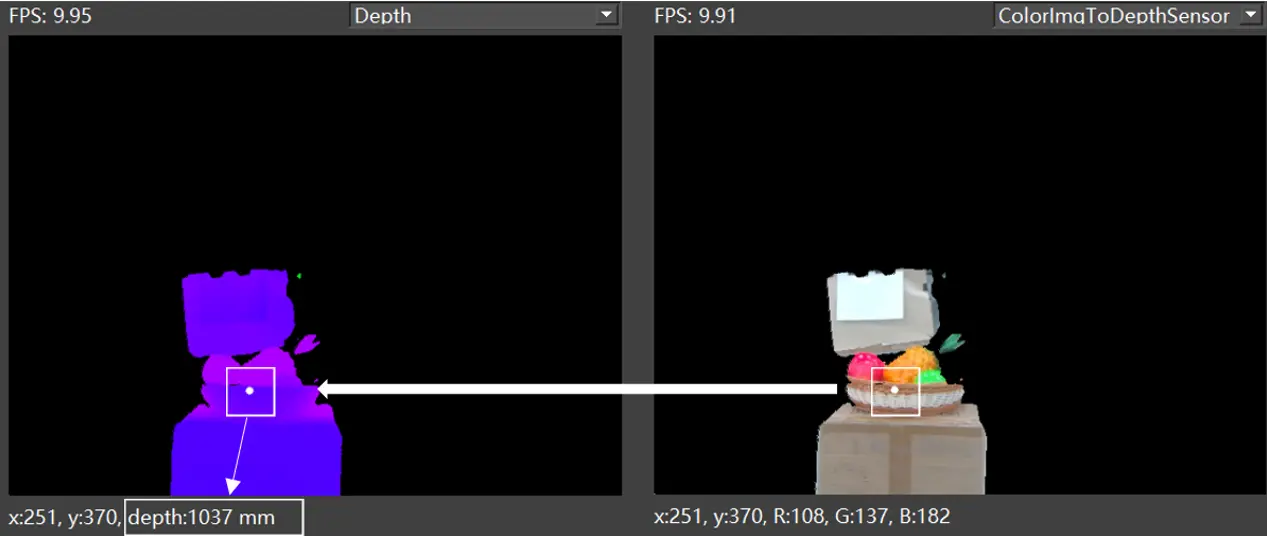
被测物体A在相机中深度图像和RGB图像如下图所示,被测物体A的深度为1.037米,没有超出最大测量距离,测得的深度值等于真实值。
被测物体B在相机中深度图像和RGB图像如下图所示,被测物体B的深度为1.035米。显然测量数值是错误数据,原因是物体B放置的距离超出了该频率的最大测量范围,发生了距离混叠现象,使得测量值不等于真实值。

从上述深度图中可以看出,物体A和物体B的深度图测量值相同,但真实位置不同。物体B发生了距离混叠现象,而物体A没有发生。
过周期现象产生的原因
由上述现象可以得出当发射的调制光往返时间(t)大于调制光的周期(T)时,距离测量值就会出错。假设传感器发出的调制红外光到达目标物体的往返时间为(t),则有以下三种情况:
如果 (t < T),则返回信号在下一周期的调制光发射之前到达。
如果 (t = T),则返回信号恰好在下一周期的调制光发射时到达。
如果 (t > T),则返回信号在下一周期的调制光发射之后到达。
在第三种情况下,距离会发生混叠,由于测量结果存在不确定性,传感器无法确定返回信号是来自第一个周期还是第某个周期,无法获得相应的相位偏移来计算真实距离,从而获得错误数据值。

如何解决过周期现象?
根据最大距离公式 dmax=c/2f ,可以看出低频调制光可以测量更长的探测距离,但会影响测量的精度,高频调制光可以获得更高的精度,但测量距离有限。二者关系如下图所示:

因此,我们可以使用多频技术来改善这个问题。多频技术允许在不降低调制频率的情况下增加测量距离。其原理是将一个或多个调制频率添加到当前频率上,每个频率具有不同的模糊距离,真实的测量位置是解算不同频率一致的位置。目前,我们的ToF系统使用双频技术。

当然,这项技术并不完美,存在一些局限性,需要牺牲帧率,运动伪影的影响较大,并且随着信噪比(SNR)的降低,深度计算误差率会相应增加,因此需要根据实际情况选择帧率。