由于ToF(Time-of-Flight)技术的原理,不同的参数配置可以使ToF相机有不同的性能表现。针对不同的应用场景,需要对Vzense ToF相机的参数进行配置,本文总结了Goermicro 3D ToF相机的参数定义,并给出配置建议。
Table of Contents
参数汇总
| 优势 | 劣势 | |
| 帧率 | 帧率越高,速度快 | 最大曝光时间小 |
| 曝光时间 | 曝光时间越高,抖动越小,黑色物体效果越好 | 容易过曝,产生拖影 |
| 空间滤波 | 点云平整,减小抖动 | 过渡区域细节缺失 |
| 时间滤波 | 点云平整,减小抖动 | 大大增加拖影,无法在运动场景应用 |
| 置信度滤波 | 可过滤掉低信噪比区域 | 不利于低反射率场景 |
| 工作模式 (主动,硬触发,软触发) | 主动模式:连续出图,适合连续监测场景 硬触发:触发实时性高,时间同步准确 软触发:无需额外连线 | 主动模式:实时性低,功耗高 硬触发:需额外接线到触发源 软触发:通过软件命令发送实时性不高 |
| IR Gain | 根据场景需求调节IR图亮度 | — |
| Gamma Correction | 根据场景需求调节Gamma曲线,从而调整画面对比度 | — |
| RGB分辨率 | RGB分辨率高,图像清晰 | 数据量增加,从而导致网络传输,存储,解码处理等环节延迟增加,主机loading增加 |
| RGB曝光方式 | 主动曝光:无需调节,自动适应环境,调整曝光 手动曝光:曝光时间固定,不随环境变化 | 主动曝光:需通过几帧过渡,不适用于触发方式 手动曝光:需手动设置,适用于光线较稳定场景 |
| RGB自动曝光最大曝光时间 | 一般不需要修改,根据帧率自动设定,用户可根据场景需求进行限制 | — |
| RGB手动曝光时间 | 据场景需求调节画面亮度,一般用于光线较稳定场景 | — |
| HDR | 可以同时拍摄场景内的高低反射率物体 | 需要多帧融合,整体帧率降低,不利于运动场景 |
| WDR(NYX独有) | 可以增加从最近到最远的测量范围 | 需要多帧融合,整体帧率降低,不利于运动场景 近远距离过渡区域会有误差 |
| 脉宽(NYX系列) | 脉宽越大,探测距离范围越大,但绝对精度和相对精度会下降 反之,脉宽越小,探测距离范围越小,对精度和相对精度会提高 |
配置建议
1、检查相机安装环境,是否有遮挡,盖板,影响散热,近距离物体,高反物体等;
2、如非连续监测的场景,尽量用触发,有利于功耗降低;
3、尽量降低帧率,有利于降低功耗,且可获得最大曝光时间,可提高深度图效果;
4、在不带来过曝,杂散光的前提下,曝光时间越长越好,可提高深度图效果;
5、在满足用户需求的前提下,RGB分辨率越低越好,可改善传输延迟,处理器loading等;
6、静态场景建议打开时间滤波,提高深度图质量;动态场景建议关闭时间滤波,避免运动拖影;
7、尽量不用HDR和WDR功能,特别是动态场景,避免运动拖影;
8、拍摄低反射物体可以增大曝光时间,或降低confidence filter;
9、如确定客户最远距离不超过3m,则优选用脉宽更窄的NYX650S,相对精度会更高;
10、对于无效数据的区域,要通过IR图配合来分析数据无效的原因。
无效点分析
在很多场景,ToF相机并无法测量到画面中的每一个像素的距离值,这些距离值往往被标注成无效点(数值为0),如下图所示,黑色区域均为ToF相机无法测量到的点。

导致ToF相机输出数据无效有几个原因:
1、置信滤波
由于距离远或者目标物体反射率过低,ToF反射回来的信号太弱,被confidence filter过滤掉,可观察IR图或降低confidence filter threshold来判定,如下图中红框区域,IR图的数值很低,说明反射回来的信号很弱。

2、近距离过曝
由于近距离过曝导致,可观察IR图来判定,如下图所示,红色框区域由于信号过强,IR图上显示亮度很高,出现过曝(IR值为255),导致深度图缺失。

3、飞点滤波
被飞点滤波过滤掉,通常发生在物体边缘,可通过开关飞点滤波来判定。如下图所示,原本在左侧关飞点滤波图像中蓝色框中的物体边缘,在右图开启飞点滤波后数据消失。
4、杂散光
对于CW-iToF,由于双频周期解算被过滤掉,通常发生在容易出现杂散光时,导致深度数据计算错误,间接导致双频解算失败,而产生无效数据。该问题较隐蔽,无法通过Depth图定位问题,可通过IR图观察场景中是否有会导致杂散光的高亮物体或近距离物体,或注意相机是否被盖板等遮挡。
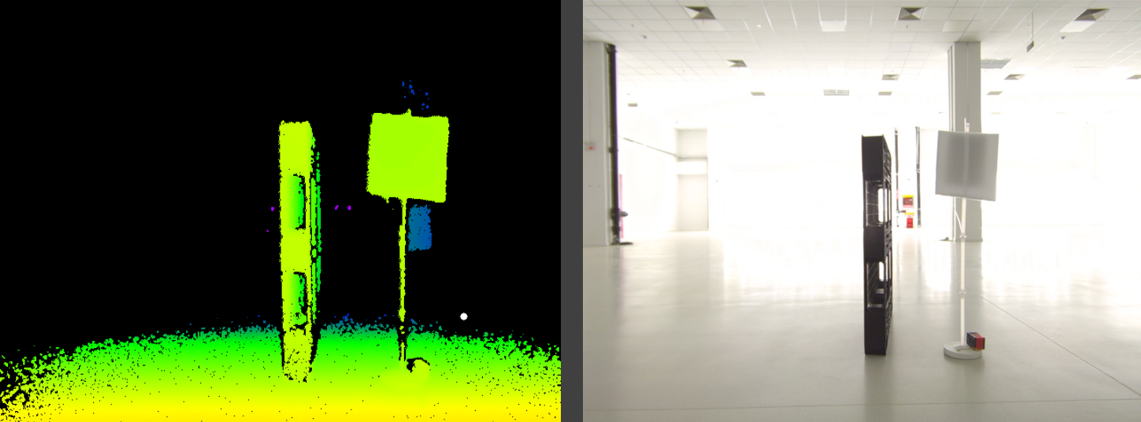
如下图所示,目标物体为反射率较低的黑色托盘和反射率较高的白色纸板。正常场景下,这两个物体都可以被识别到。
如下图所示,当出现近距离物体(手)的时候,黑色托盘深度许多数据无效,这个过程中并未改变任何参数配置,这就是由于近距离物体(手)带来的杂散光,导致黑色托盘数据偏差太大,无法完成双频周期解算导致。而白色纸板由于反射率较高,受杂散光影响较轻,所以并没有出现无效数据。

5、解周期
对于CW-iToF,由于双频周期解算出错,产生无效数据,被算法过滤掉。通常发生在容易出现杂散光、多径干扰时,深度数据计算错误,间接导致双频解算失败,产生无效点。