Table of Contents
时间滤波的介绍
时间滤波的核心思想是帧间平均,即当前帧与时间上相邻帧的加权平均,以平滑噪声。时间滤波通常是低通滤波。让我们了解一种低通滤波的计算方法—指数移动平均滤波。指数移动平均算法允许对不同的样本赋予不同的权重,其计算公式如下:
X‘i = αXi + (1 – α)Xi-1
其中:
X‘i:输出,时间序列(滤波信号)的第i个成员的估计。
Xi :输入,时间序列(带噪声信号)的第i个元素。
α:平滑因子。
在这个算法中,只需配置平滑因子α参数,其取值范围在 (0, 1) 之间。通过减小α,我们可以减少噪声,但同时会增加滞后。
ScepterGUITool 中时间滤波的应用
用户可以在 ScepterGUITool 上启用/关闭时间过滤器功能,如下图所示:
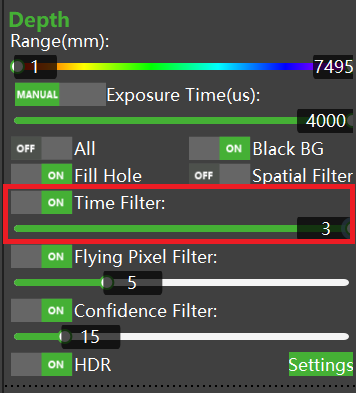
使用 ToF 相机检测物体,关闭时间滤波,其点云图如下所示:
开启时间滤波,时间滤波阈值范围为[1, 3],用户设置的阈值越大,图像抖动越小。
以下点云显示了时间滤波阈值为3的示例:
时间滤波的优缺点
优点: 可以减少噪声,图像抖动减弱。
缺点: 不适用于动态场景,会产生运动模糊。