







技术笔记
深入研究相机各种技术,了解它们基本原理!
-
技术笔记20-结构光还是iToF?看完这篇不再“深度”纠结!
本文主要介绍了结构光技术与iToF的性能对比、各自的优缺点以及适合场景应用,方便用户针对不同需求选择合适的相机。
-
技术笔记19-选LiDAR还是iToF?看完这篇不再“雾里看花”!
本文介绍激光雷达和iToF相机的性能对比、各自的优缺点以及场景应用介绍,方便用户根据需求选择合适的相机。
-
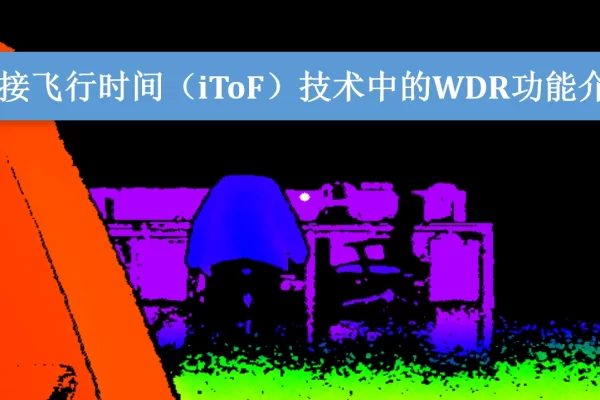
技术笔记18-间接飞行时间(iToF)技术中的WDR功能介绍
本文主要介绍WDR模式的图像,相比普通的图像,可以提供更宽的检测距离和更多的数据细节,利用每个检测范围对应最佳细节的图像来合成最终WDR图像,能够使图像中近处和远处的场景都得到最佳成像。
-
技术笔记17-飞行时间(ToF)相机的优势及应用
概述 3D相机为机械设备构筑了一扇通往真实世界的感知之窗,作为自动化进程中不可或缺的桥梁与纽带,它不仅引领着机 […]
-
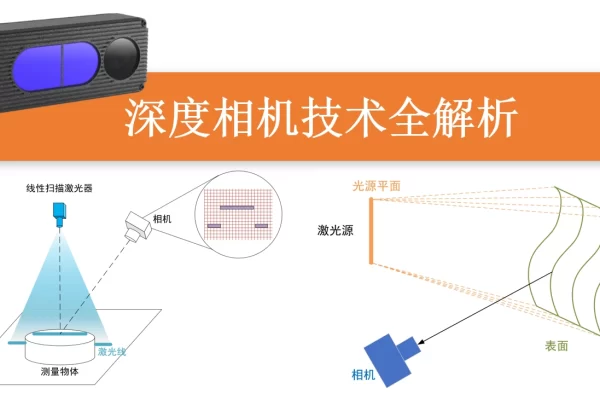
技术笔记16-深度相机技术全解析
本文介绍了四种不同类型的深度感知相机以及其技术原理,包括双目视觉技术、飞行时间技术、结构光技术、线激光技术,分析了它们优劣势并且介绍了各自使用场景以及考虑因素,方便用户可以更好地选择合适的技术及产品。
-
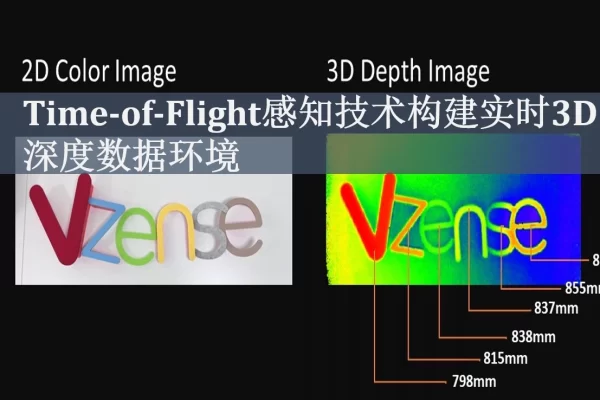
技术笔记15-Time-of-Flight感知技术构建实时3D深度数据环境
三维视觉技术是人类为了提升机器视觉的维度,将立体图像呈现在眼前,可以满足以往2D视觉难以实现的应用场景。本文介绍了3D视觉技术的分类、ToF相机的组成以及实现原理、ToF相机的应用领域,方便用户了解3D深度数据环境。
-
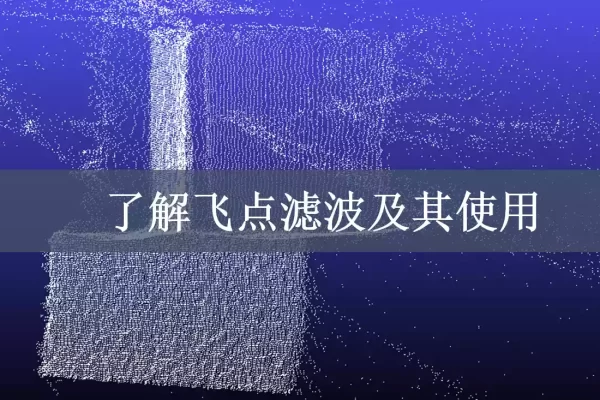
技术笔记14-了解飞点滤波及其使用
飞点作为由ToF相机生成的3D点云中的错误像素出现,通常出现在场景的深度不连续处,特别是在物体边界处,前景和背景的光线可能在边缘处结合,产生中间错误的深度值,导致鬼影像素的出现。本文介绍了一种消除飞点的滤波。
-

技术笔记13-理解空间滤波快速指南
本文介绍一种减少噪声的滤波器—空间滤波器,该方式主要是用滤波器掩模将周围邻域的平均值替换图像中每个像素的值,从而达到整体图像平滑的效果。并且介绍了在ScepterGUITool 中空间滤波的应用及相应参数设置,方便用户直观地感受此滤波器的效果。
-
技术笔记12-深度学习置信滤波
本文介绍了一种过滤弱信号质量的滤波—置信滤波。置信滤波是一种高通滤波器。置信度值越高,数据越可信,可以设置置信度阈值将置信度较低的像素过滤。对于ToF相机,可用于过滤掉反射率低的物体。用户可以根据实际场景需求设置合适的阈值。
-
技术笔记11-相机中杂散光的形成以及如何最小化其影响
杂散光是指外部光源进入镜头并与内部组件相互作用时产生的,杂散光存在可能会降低图像质量,并在图像中产生不必要的信息。在本文中,介绍了什么是杂散光,杂散光的形成来源以及如何降低杂散光对图像的影响,方便用户在使用相机中更好的了解错误数据来源。
-
技术笔记10-时间滤波综合指南
本文介绍了用于平滑噪声、减小图像抖动的时间滤波,此滤波不适合动态场景,会产生运动模糊。另外,介绍了ScepterGUITool 中时间滤波的应用以及参数设置,方便用户可以需要根据实际场景选择合适的阈值。
-

技术笔记09-了解飞行时间(ToF)相机的视场
视场是指相机传感器上可以捕捉到场景或物体的最大区域。根据视场的方向,视场角可以分为三类视场分别为水平视场、垂直视场、对角视场。本文介绍了ToF相机不同视场覆盖的范围以及X, Y分辨率,方便用户了解测量物体在ToF相机中的分辨率大小。
-
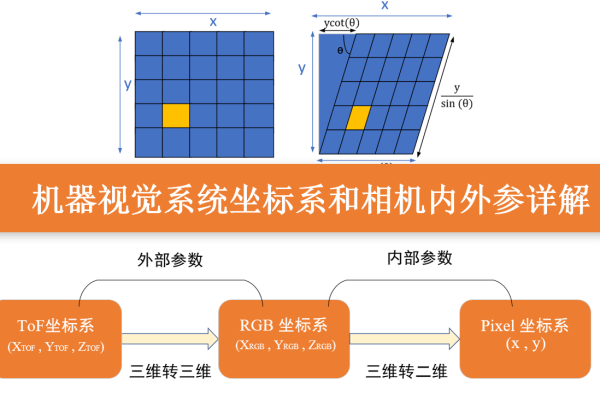
技术笔记08-机器视觉系统坐标系和相机内外参详解
机器视觉系统有三大坐标系,分别是:世界坐标系、相机坐标系、像素坐标系。本文介绍了三大坐标系的转换、如何获取相机的内外参数以及如何转换为点云图,方便用户可以进一步了解相机内外参在坐标转换的功能。
-
技术笔记07-深入研究间接飞行时间(iToF)相机中的IR图像
iToF相机可以输出IR图像和深度图。由于深度图和IR图像来自同一个传感器输出,这两幅图像在时间上完全对齐,并且在空间上逐像素对齐。由于人眼感知图像的方式是光强度的对数函数,而不是线性函数,因此设备显示和人眼感知的图像不一致。本文介绍了补偿二者差异的—方法增益和伽马矫正。
-
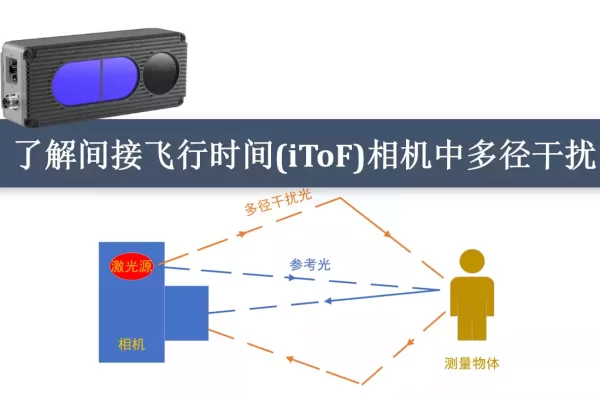
技术笔记06-了解间接飞行时间(iToF)相机中多径干扰
iToF 相机通过自身发射光源并根据接收到反射光返回相机的时间来计算距离。在光线接收的过程中,单个像素接收到的光源可能是由一条或多条路径引起的,这将会导致深度误差。本文详细介绍了会产生多径干扰的场景以及如何最大化减小干扰的影响。
-
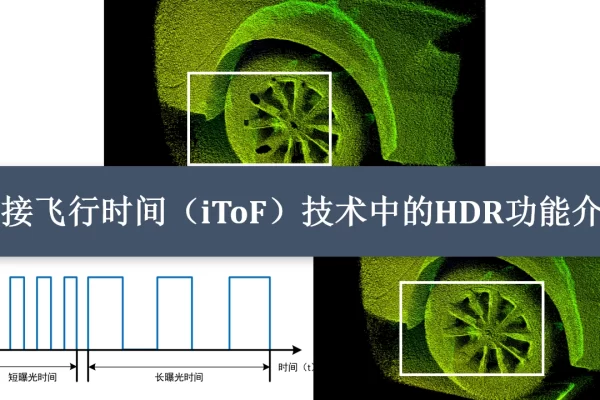
技术笔记05-间接飞行时间(iToF)技术中的HDR功能介绍
为了解决目标区域内高反射率和低反射率物体共存的成像问题,本文介绍了一种HDR 技术可以改善,其原理是使用多帧融合,将两张具有不同曝光模式的图像融合在一起,更好地捕捉曝光中无法检测到或过曝的区域,从而实现更大的曝光动态范围。
-

技术笔记04-基于间接飞行时间的连续波技术(CW-iToF)中双频调制是什么?
根据CW-iToF公式可知频率越低,测量距离的最大值越大,伴随着精度降低或较大抖动的问题。相反,频率越高,精度越高,但增加频率会导致测量距离减少。本文介绍了解决CW-iToF过周期现象的一种方法是双频测量,即对同一测量对象使用两个不同的频率,并从两次测量的结果中确定真实距离。
-

技术笔记03-了解间接时间飞行的连续波技术(CW-iToF)中过周期现象
ToF系统通过调制红外光的发射和接收之间的时间差来测量距离。本文介绍一种过周期现象。当第一个周期的调制光返回并被检测到之前第二个周期的调制光已经发射时,使得传感器无法区分接收到的是哪个周期的调制光,从而产生过周期现象。
-

技术笔记02-间接飞行时间(iToF)技术原理介绍:连续波技术和脉冲波技术
iToF 的工作原理是相机自身向真实物理场景发射调制的红外光信号,传感器接收从测量物体返回的光信号,通过测量相位偏移来计算测量光的飞行时间,从而实现距离测量。本文介绍了 iTOF 的两种技术原理分别是基于连续波(Continuous Wave)技术和脉冲波(Pulse)技术。
-
技术笔记01-理解绝对精度与相对精度:二者区别是什么?
本文介绍了绝对精度和相对精度的概念。绝对精度是评价测量值与真实值之间偏差的标准。如果测量值越接近真实值,那么测量就越准确。相对精度是评价不同测量值之间效果的标准。如果测量值与其他测量值更接近,则测量精度更高。



