








应用笔记
探索Vzense 3D ToF相机的便捷使用秘籍!
-
应用笔记28-Vzense 3D ToF相机高低温环境使用指南及注意事项
本文介绍了Vzense 3D ToF相机在高低温环境下的使用方法和注意事项,以及减少相机发热的措施和改善相机散热效率的方法。
-
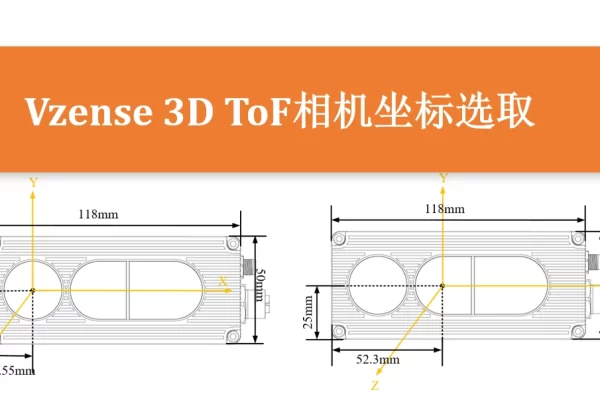
应用笔记27-Vzense 3D ToF相机坐标选取
机器视觉场景中相机与机器人的标定影响着数据的准确性,那么选取正确的相机坐标就十分重要,本文详细介绍了Vzense 3D ToF相机坐标如何选取。
-

应用笔记26-Vzense ScepterSDK开发的FAQ
本篇文章介绍了Vzense研发的软件ScepterSDK在使用中可能遇见的问题以及解决办法,方便用户在二次开发中及时找到问题的原因以及相应的解决办法,提高使用效率。
-

应用笔记25-Vzense ScepterGUITool工具使用FAQ
本篇文章主要介绍了Vzense研发的ScepterGUITool工具在使用中出现的常见问题以及解决办法,帮助用户在使用的时候更快更准的定位问题原因,增强使用的体验感。
-

应用笔记24-Vzense DS系列ToF相机深度质量测试
本文介绍了Vzense ToF相机DS系列(DS86、DS87)深度质量测试。将相机放置在适合的测试条件下,分别测试物体从0.5m运动到5m处的深度值,重复32次取平均值。基于测试结果分析可知DS系列产品的精度随着距离的增加而降低,随着曝光时间的增加而升高。
-
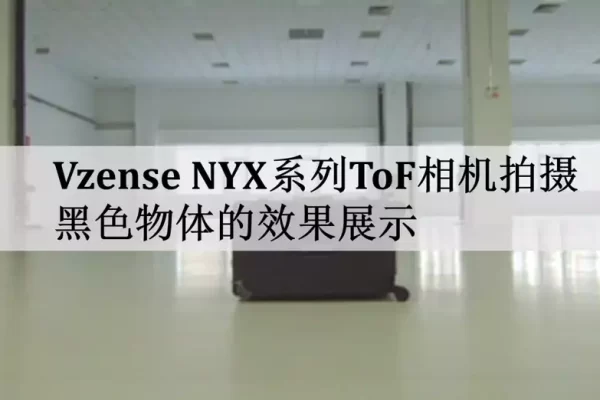
应用笔记23-Vzense NYX系列ToF相机拍摄黑色物体的效果展示
在3D ToF成像技术中,被测目标物的反射率会对成像效果有非常明显的影响。例如黑色物体,当ToF相机的主动光源照射到目标物后,由于其反射率低,能够反射回相机的光线能量大幅降低,从而导致相机的成效效果不佳。本文主要测试了Vzense NYX系列相机对黑色目标的成像效果。
-

应用笔记22-Vzense NXY系列ToF相机拍摄运动场景的效果展示
3D ToF技术具有性价比高,帧率阈值范围大,实时性好,对系统算力要求低,适合捕捉运动目标的特点,有效解决了运动模糊等问题,使其在工业3D识别领域中的应用越来越广泛。本文主要介绍Vzense ToF 相机在运动场景下成像效果的展示。
-
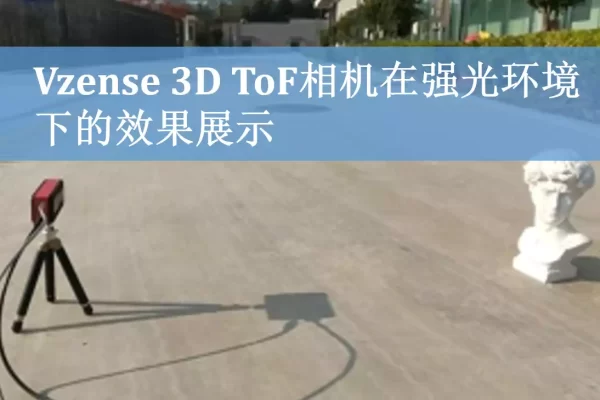
应用笔记21-Vzense 3D ToF相机在强光环境下的效果展示
ToF技术在内的3D成像技术广泛应用于消费电子、工业、安防和监控、机器人等领域。而对于ToF这种主动发射光线的3D成像技术在实际运用中还面临一些关键行的挑战,其中之一就是在室外强环境光照设下ToF技术的成像效果。本文主展示Vzense ToF DS86和NYX650 相机在强光环境下拍摄物体的成像效果。
-

应用笔记20-Vzense 3D ToF相机DS系列和NYX系列对比
本文主要是详细介绍了Vzense主推的DS系列和NYX系列两款产品的不同之处以及各自的优势。通过不同场景测试,根据展示效果,让用户更直观的了解不同系列所适合的场景,可以更好帮助用户针对所需场景进行产品选择。
-
应用笔记19-Vzense 3D ToF相机参数配置方法
本文介绍了Vzense ToF相机如何生成参数配置文件(.json文件)以及相机参数设置的方法。不同的应用场景对工作参数的需求不同,为了方便用户的调试与使用,Vzense相机设计了不同的方式帮助用户预设相机参数,并且可以针对自己的需求进行自由设置。
-

应用笔记18-ScepterGUITool图像的保存及查看
本文介绍了ScepterGUITool工具中不同类型的图像(深度图/RGB图/IR图/点云图等)如何保存,以及用户如何查看保存的图像,借助Image J和CloudCompare工具对保存的图像进行参数状态查看并对其进行相关操作,嵌入到其他应用。
-

应用笔记17-Vzense 3D ToF相机参数汇总及配置建议
不同的参数配置可以使ToF相机有不同的性能表现。本文介绍了针对不同的应用场景,对Vzense ToF相机参数进行配置的优劣势以及针对某些场景的配置建议,方便用户可以根据实际需求,调整设置相应参数,达到期望效果。
-

应用笔记16-Intel Realsense D435 vs. Vzense DS86评测
本文主要对比不同公司的两款相机Intel Realsense D435和Vzense DS86,根据各自不同的技术原理、相机参数、性能等条件下对比不同场景下的深度图以及点云图,比较成像效果,更直观的向用户展示Vzense相机的成像效果。
-
应用笔记15-NYX系列ToF相机托盘识别场景测试
本文介绍了NYX系列(NYX650、NYX660)ToF相机对不同材质的托盘识别进行测试,包括黑色塑料托盘、蓝色塑料托盘、木质托盘、镀锌金属托盘,分别设置不同的测试条件得出不同的测试结果,更好的向用户展示了相机识别不同材质的托盘成像效果。
-
应用笔记14-Vzense NYX系列ToF相机深度质量测试
本文介绍了Vzense ToF相机NYX系列(NYX650、NYX660)深度质量测试。将相机放置在适合的测试条件下,分别测试物体从0.5m运动到4.5m处的深度值,重复32次取平均值。基于测试结果分析可知NYX系列的精度随着距离的增加而降低,随着曝光时间的增加而升高。
-

应用笔记13-Vzense 3D ToF相机的各种滤波应用
本文分别介绍了时间滤波、置信滤波、空间滤波、飞点滤波四种滤波在ScepterGUITool中的应用设置以及在软件中的API实现和参数设置方法,方便用户更深入的了解四种滤波的功能,使用中可以更好的配置适合场景的参数。
-
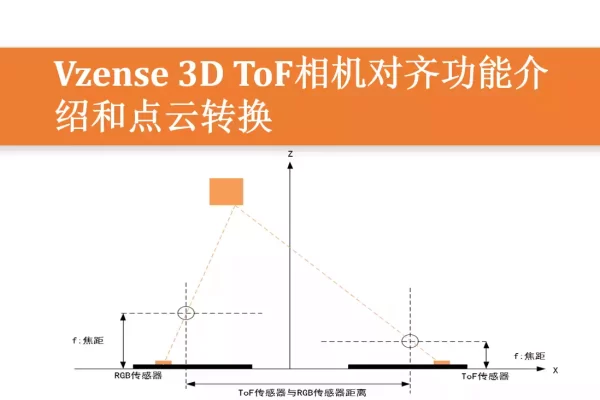
应用笔记12-Vzense 3D ToF相机对齐功能介绍和点云转换
Vzense的产品具有RGB图像和深度图像两个传感器。本文介绍的图像对齐是指将RGB图像与深度图像通过坐标系转换,将世界坐标系下的同一物体寻找一种空间变换关系,建立统一的坐标系,将一幅图像映射到另一幅图像上,使得两图中的像素点数据一 一对应的过程。
-
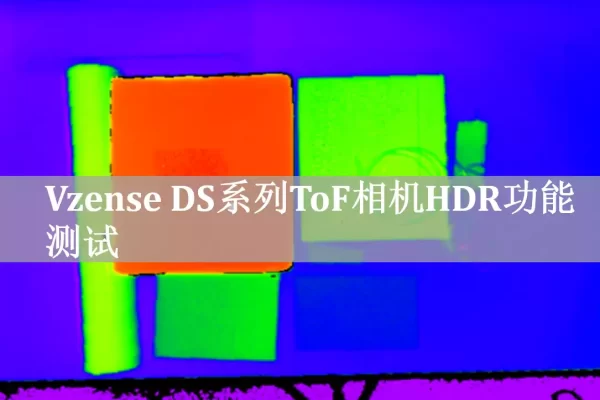
应用笔记11-Vzense DS系列ToF相机HDR功能测试
本文介绍了Vzense DS系列ToF相机的HDR功能,主要针对多种反射率物体进行测试,展示了测试结果的深度图和点云图,方便用户更直观的查看HDR效果,并且介绍了在ScepterGUITool和SDK中HDR的使用方法。
-
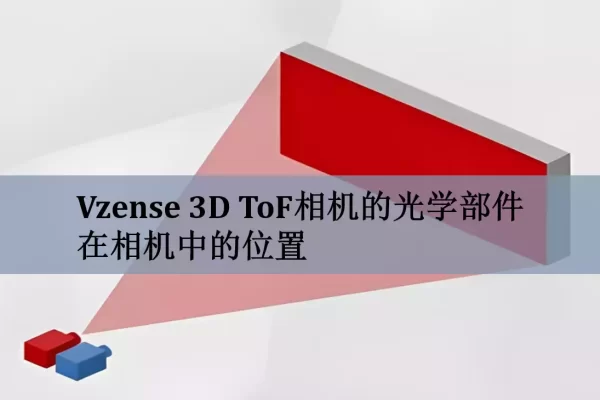
应用笔记10-Vzense 3D ToF相机的光学部件在相机中的位置
本应用笔记介绍了Vzense ToF相机NYX系列(NYX650、NYX660)和DS系列(DS86、DS87)的光学部件(RGB相机、ToF相机、激光器)在相机中的位置和视场角,用户可以参照相机的参数信息合理的安装并使用相机。
-
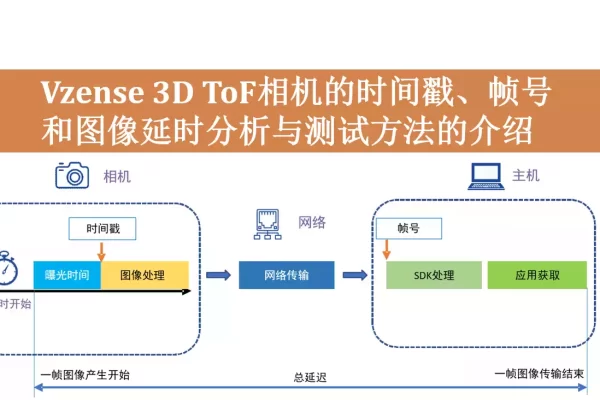
应用笔记09-Vzense 3D ToF相机的时间戳、帧号和图像延时分析与测试方法的介绍
本文介绍了Vzense ToF相机的一帧图像从产生到传输完成的过程,包括曝光时间、图像处理、网络传输、SDK处理、应用获取。相机在每帧曝光结束都会打一个时间戳,当图像送到主机SDK都会标记唯一的帧号,结合以上信息可以分析出相机的延时。
-

应用笔记08-Vzense NYX系列ToF相机如何实现多机共存
本文介绍了通过Vzense ToF相机提供的从触发模式,可以协同控制实现多相机同时工作。其中协同控制方式是将多台相机全部设置为触发模式,由主控平台分别控制不同相机的曝光开始时间,保证不同相机之间不会相互干扰。
-
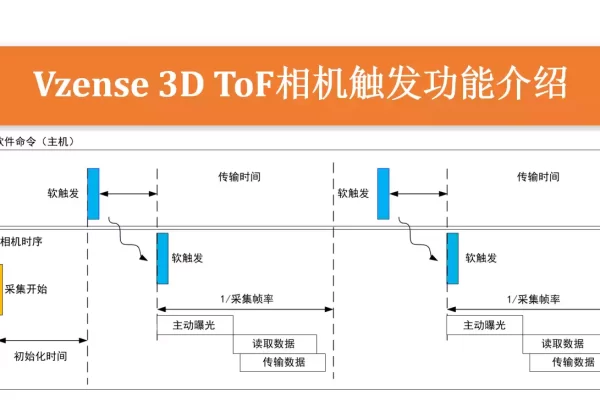
应用笔记07-Vzense 3D ToF相机触发功能介绍
本文介绍了Vzense ToF相机提供了三种工作模式,分别为主动模式(Active)、硬触发模式(Hardware Trigger)、软触发(Software Trigger)三种模式的实现原理和配置参数以及三种模式相应的API调用接口,方便用户可以选取需要的工作模式获取相应的图像。
-

应用笔记06-Vzense 3D ToF相机的PTP功能设置方法介绍
本文介绍了PTP利用网络中的时钟设备进行时间同步,通过在网络中传递精确的时间戳来实现同步。它采用主从架构,其中一个节点作为主时钟,其他节点作为从时钟。主时钟通过发送时间戳报文来同步从时钟,从时钟通过接收并处理这些报文来调整自己的时钟。
-
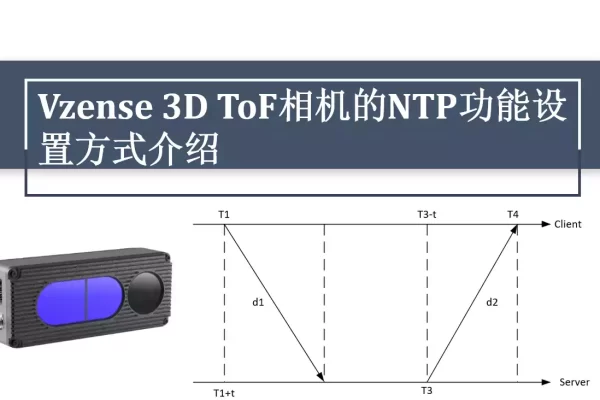
应用笔记05-Vzense 3D ToF相机的NTP功能设置方式介绍
本文介绍一种基于UDP协议的网络时钟协议(NTP),用于同步计算机系统的时钟。NTP使用树形结构来实现时间同步。它分为时钟源和时钟客户端两个角色,时钟源提供时间标准,时钟客户端通过和时钟源通信来同步本地时钟,是最典型的C/S方式。



