Table of Contents
技术原理
1、激光雷达LiDAR
原理:通过发射激光脉冲并测量其从目标反射返回的时间计算距离。
类型:三角测距法、直接飞行时间测距法(direct Time of Flight,dToF)和连续调频波测距法(Frequency Modulated Continuous Wave,FMCW)。
2、间接飞行时间iToF
原理:通过主动发射调制光源照射目标,接收反射光信号后通过相位差计算时间从而计算距离。
类型:连续波(Continuous Wave indirect Time of Flight, CW-iToF)技术、脉冲波(Pulse indirect Time of Flight, P-iToF)技术。

系统架构
1、激光雷达LiDAR
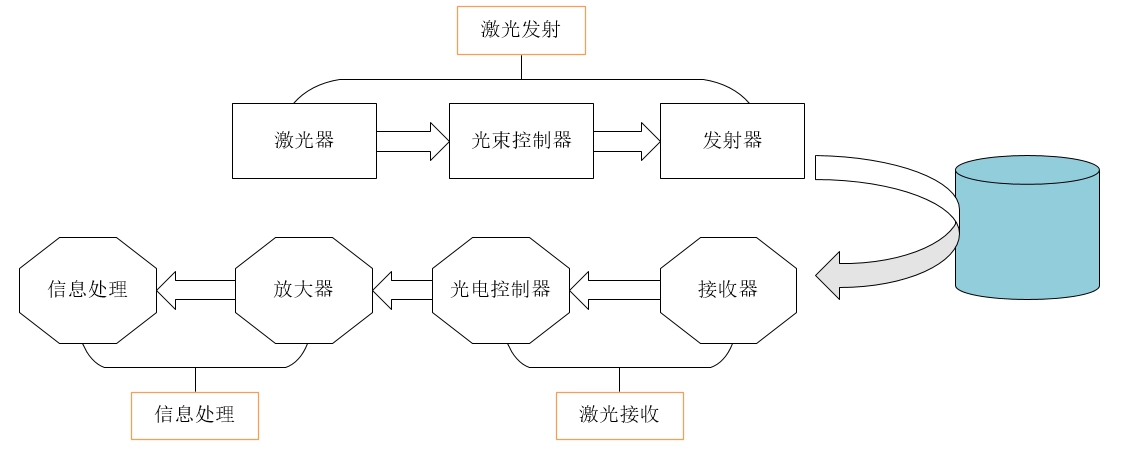
结构组成:激光雷达包括激光发射、激光接收、光束操纵和信息处理四大系统,如下图所示:
主动扫描:依赖机械扫描结构逐点/逐线探测。
根据光束扫描方式的不同可将激光雷达分为机械式激光雷达、半固态激光雷达和全固态激光雷达,具体如下表所示:
| 类型 | 技术架构 |
|---|---|
| 机械式激光雷达 | 机械旋转式 |
| 半固态激光雷达 | MEMS微振镜 |
| 转镜 | |
| 棱镜 | |
| 全固态激光雷达 | 光学相控阵OPA |
| FLASH面阵 |
2、iToF相机
结构组成:iToF相机是指以光学系统为接受路径的面阵非扫描式3D成像深度信息捕捉技术,主要由照射单元,光学透镜,成像传感器,控制单元,计算单元等器件组成。
面阵式探测:单次曝光捕获全场景深度(无需扫描),独立工作。

根据发射光信号的不同,iToF相机分为基于连续波技术的DS系列相机、基于脉冲波技术的NYX系列相机,具体型号如下表所示:
| 类型 | 技术架构 |
|---|---|
| DS系列(连续波) | DS86 |
| DS87 | |
| DS77 Lite/Pro | |
| DS77C Lite/Pro | |
| NYX系列(脉冲波) | NYX650 |
| NYX660 | |
| NYX660S |
核心性能对比
| 性能值 | LiDAR | iToF相机 |
| 测距范围 | ⭐⭐⭐⭐ | ⭐⭐ |
| 精度 | ⭐⭐ | ⭐⭐⭐⭐⭐ |
| 分辨率 | ⭐⭐⭐ | ⭐⭐⭐⭐⭐ |
| 帧率 | ⭐ | ⭐⭐⭐⭐⭐ |
| 环境干扰 | ⭐⭐⭐⭐ | ⭐⭐⭐ |
| 功耗 | ⭐⭐⭐⭐⭐ | ⭐⭐ |
| 成本 | ⭐⭐⭐⭐⭐ | ⭐⭐⭐ |
| 体积 | ⭐⭐⭐⭐⭐ | ⭐⭐ |
优缺点对比
1、激光雷达(LiDAR)
优点:长距离探测能力强;适应高速移动场景(如自动驾驶);环境适应性强。
缺点:成本高昂;机械式雷达体积大、寿命有限(旋转部件磨损);数据处理复杂(点云需GPU/专用芯片解析);难以对物体做出迅速识别与定位。
2、 iToF相机
优点:低成本,低功耗、小体积,便于集成;实时性强(高帧率),目标细节突出;物体识别能力强,可以迅速分割、定位。
缺点:精度受多路径反射、环境光噪声影响;测距范围短,远距离性能不足;对物体反射率的要求较高,透明/高反光条探测困难。
应用场景选取
激光雷达(LiDAR)
自动驾驶:用于高精度环境感知(如Waymo、L4级车辆)。
工业测量:三维建模、桥梁检测、地质勘探。
机器人导航:AGV、仓储机器人避障与路径规划。
智慧城市:交通流量监控、建筑数字化。
iToF相机
工业机器人识别:AGV及AMR 的托盘识别与避障。
智能拆码垛:动态抓取与分拣。
物流领域:单件分离和仓库的货位检测。
安防监控:客流计数、禁区入侵检测。
智慧农业:果蔬识别与摘取。