Table of Contents
技术原理
1、结构光(Structured Light)
原理:通过投射特定编码的光学图案(如条纹、点阵或随机散斑),利用摄像头捕获物体表面形变后的图案,结合几何三角测量计算深度。
核心依赖:图案的精确投射与匹配算法。
2、间接飞行时间(iToF, indirect Time-of-Flight)
原理:发射经过调制的连续光波,测量反射光与发射光的相位差,通过相位偏移计算光的飞行时间,进而推算距离。
核心依赖:时间分辨能力与相位检测精度
核心性能对比
| 结构光相机 | iToF相机 | |
| 分辨率 | ⭐⭐⭐⭐⭐ | ⭐⭐⭐⭐ |
| 测量距离 | ⭐⭐ | ⭐⭐⭐⭐⭐ |
| 精度 | ⭐⭐⭐ | ⭐⭐⭐ |
| 抗环境光 | ⭐ | ⭐⭐⭐⭐⭐ |
| 功耗 | ⭐⭐⭐⭐ | ⭐⭐ |
| 动态场景适应性 | ⭐ | ⭐⭐⭐⭐⭐ |
优缺点对比
1、结构光相机
优点:高精度、适合复杂表面细节捕捉。
缺点:环境光敏感、体积较大、成本较高、远距离性能差、过拟合问题严重。
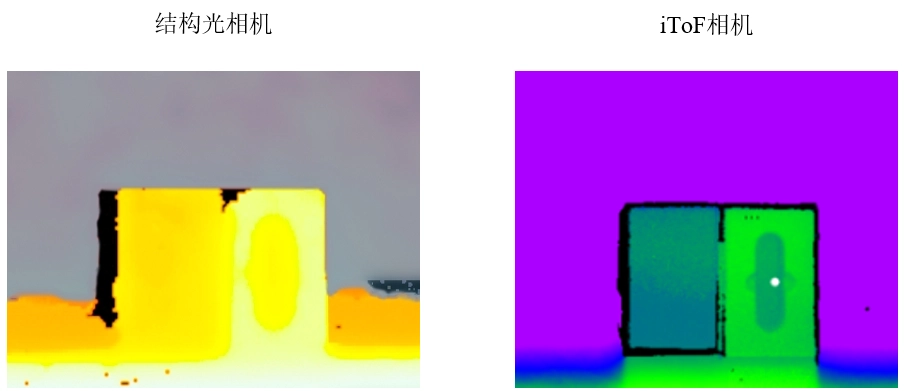
其中:过拟合指模型或算法在特定实验数据或场景中表现优异,但在面对新环境、新材质或噪声干扰时性能显著下降的现象。原因是算法对训练数据(标定数据)或物理假设的过度依赖,导致泛化能力不足,成像如下图所示:
2、iToF相机
优点:帧率高实时性强、远距离适用、抗环境光强、易小型化。
缺点:精度受限、多路径干扰敏感、低反射率表面表现差。
应用场景选取
1、结构光相机
消费电子:手机人脸识别(如iPhone Face ID)、3D建模。
工业:精密零件检测、逆向工程。
医疗:牙科扫描、手术导航。
2、iToF相机
工业机器人识别:AGV及AMR 的托盘识别与避障。
智能拆码垛:动态抓取与分拣。
物流领域:单件分离和仓库的货位检测。
安防监控:客流计数、禁区入侵检测。
智慧农业:果蔬识别与摘取。