Table of Contents
物体反射率对相机的影响
不同颜色和材料的物体对光的反射率不同。iToF(indirect Time-of-Flight)相机通过发射调制激光来测量距离。由于物体反射率的差异,相同光强下反射的能量也不同。对于低反射率的物体,反射光信号较弱,可能低于传感器的有效阈值,造成无法成像。对于高反射率的物体,反射光的强度超过了图像传感器的有效阈值,会出现过曝现象。如下图所示:

过曝现象
传感器是否发生过曝取决于光圈大小和曝光时间。光圈是指阀门打开的大小,控制单位时间内的光通量。曝光时间是指阀门打开的时间,控制总曝光时间。这可以比作一个接水的水龙头,如下图所示:
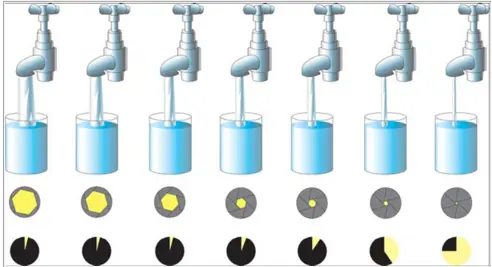
对于单个像素,当光强足够强时,此时像素无法再存储更多电荷,过曝现象就会发生。在过曝状态下,像素失去了存储额外电荷的能力,这些多余的电荷会扩散到邻近的像素,导致它们也出现饱和或出错。对于传感器成像,过曝现象在深度图像中表现为黑点,在IR图像中表现为白点。
为了确保成像效果,低反射率的物体需要增加曝光时间和光强信号,但这会带来高反射率物体过曝的问题。如果需要对高反射率物体进行良好成像,则需要减少曝光时间,这会导致低反射率物体因信号强度不足而无法成像。为了解决目标区域内高反射率和低反射率物体共存的成像问题,我们使用高动态范围(HDR)成像技术。
HDR成像技术介绍
HDR 技术使用多帧融合,将两张具有不同曝光模式的图像融合在一起,以获得更好的图像效果。HDR 技术可以更好地捕捉曝光中无法检测到或过曝的区域,从而实现更大的曝光动态范围。
HDR成像原理
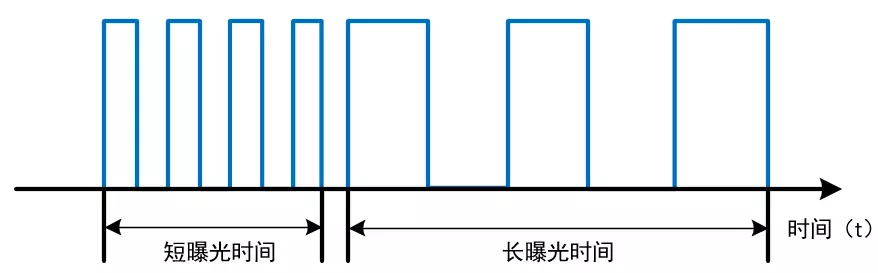
HDR 模式下的图像使用长曝光时间来确保低反射率区域能够正确成像,然后添加短曝光时间来确保长曝光时间下的过曝区域能够成像。短曝光时间的选择由长曝光时间的长度决定,通常是长曝光时间的 1/8 到 1/10。 HDR 生成一帧图像的时间组成如下图所示:
根据实际应用需求,综合考虑测量精度、测量距离、功耗、帧率等因素,选择相应的频率。
HDR功能展示
相机放置在距离被测物体900mm的地方,曝光时间为1000μs,长曝光时间的频率为120MHz和20MHz,短曝光时间的频率为60MHz。HDR开启和关闭后的成像效果如下图所示:
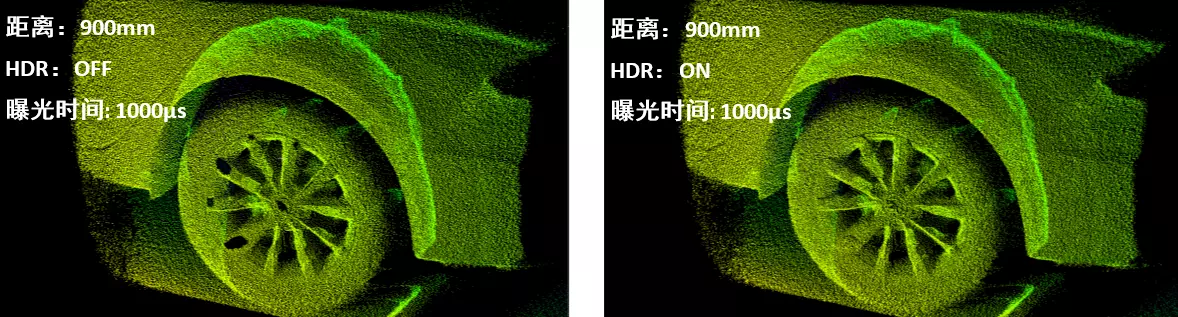
开启 HDR 后,在深度图中可以看到低反射率的黑色轮胎和高反射率轮毂。
HDR的缺陷
HDR 模式无法解决所有高反射率和低反射率物体共存的复杂场景,仍会出现下面的问题:
问题1:在近距离测量高反射率物体时,可能仍会出现过曝现象。
问题2:在 HDR 填充区域,不同频率的短曝光时间内深度信息抖动过大的现象。